Un nuevo robot del tamaño de un insecto creado por investigadores de la Universidad de California, Berkeley, corre a la velocidad de una cucaracha y puede soportar el peso de un humano. Crédito:UC Berkeley foto de Stephen McNally
Si la vista de un insecto que se desliza te hace retorcer, es posible que desee mirar hacia otro lado:un nuevo robot del tamaño de un insecto creado por investigadores de la Universidad de California, Berkeley, puede correr por el suelo casi a la velocidad de una cucaracha.
Y es casi tan resistente como una cucaracha también. Intenta aplastar este robot debajo de tu pie y más que probable, simplemente seguirá adelante.
"La mayoría de los robots a esta pequeña escala en particular son muy frágiles. Si los pisas, prácticamente destruyes el robot, "dijo Liwei Lin, profesor de ingeniería mecánica en UC Berkeley y autor principal de un nuevo estudio que describe el robot. "Descubrimos que si le damos peso a nuestro robot, todavía funciona más o menos ".
Pequeña, robots duraderos como estos podrían ser ventajosos en misiones de búsqueda y rescate, apretando y aplastando en lugares donde los perros o los humanos no pueden caber, o donde puede ser demasiado peligroso para ellos ir.
"Por ejemplo, si ocurre un terremoto, es muy difícil para las grandes máquinas, o los perros grandes, para encontrar vida debajo de los escombros, por eso necesitamos un robot de tamaño pequeño que sea ágil y robusto, "dijo Yichuan Wu, primer autor del artículo, quien completó el trabajo como estudiante graduado en ingeniería mecánica en UC Berkeley a través de la asociación Tsinghua-Berkeley Shenzhen Institute. Wu es ahora profesor asistente en la Universidad de Ciencia y Tecnología Electrónica de China.
El estudio aparece hoy (miércoles, 31 de julio) en la revista Ciencia Robótica .
El robot, que es aproximadamente del tamaño de un sello postal grande, está hecho de una hoja delgada de un material piezoeléctrico llamado fluoruro de polivinilideno, o PVDF. Los materiales piezoeléctricos son únicos, en el sentido de que aplicarles voltaje eléctrico hace que los materiales se expandan o contraigan.
Los investigadores recubrieron el PVDF con una capa de un polímero elástico, lo que hace que toda la hoja se doble, en lugar de expandirse o contraerse. Luego agregaron una pata delantera para que, a medida que el material se dobla y se endereza bajo un campo eléctrico, las oscilaciones impulsan el dispositivo hacia adelante en un movimiento de "salto".

El robot está construido con un material en capas que se dobla y se endereza cuando se aplica voltaje de CA, haciendo que salte hacia adelante en un movimiento de "salto". Crédito:UC Berkeley foto de Stephen McNally
El robot resultante puede ser simple de mirar, pero tiene algunas habilidades notables. Puede navegar por el suelo a una velocidad de 20 cuerpos por segundo, una tasa comparable a la de una cucaracha y se informó que es el ritmo más rápido entre los robots a escala de insectos. Puede atravesar tubos, subir pequeñas pendientes y transportar cargas pequeñas, como un maní.
Quizás lo más impresionante, el robot, que pesa menos de una décima parte de un gramo puede soportar un peso de alrededor de 60 kg, aproximadamente el peso de un humano promedio, que es aproximadamente 1 millón de veces el peso del robot.
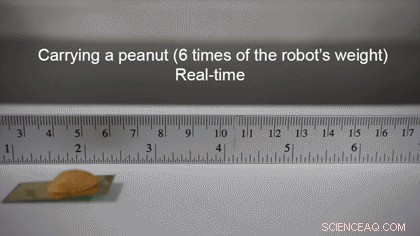
Robustez escalada, y transporte de cargas. Crédito:Wu et al., Sci. Robot. 4, eaax1594 (2019)
"La gente puede haber experimentado eso, si pisas la cucaracha, puede que tengas que molerlo un poco, de lo contrario, la cucaracha aún puede sobrevivir y huir, ", Dijo Lin." Alguien que pisa nuestro robot está aplicando un peso extraordinariamente grande, pero [el robot] todavía funciona, todavía funciona. Entonces, en ese sentido particular, es muy similar a una cucaracha ".
Actualmente, el robot está "atado" a un cable delgado que transporta un voltaje eléctrico que impulsa las oscilaciones. El equipo está experimentando con la adición de una batería para que el robot pueda moverse de forma independiente. También están trabajando para agregar sensores de gas y están mejorando el diseño del robot para que pueda sortear obstáculos.