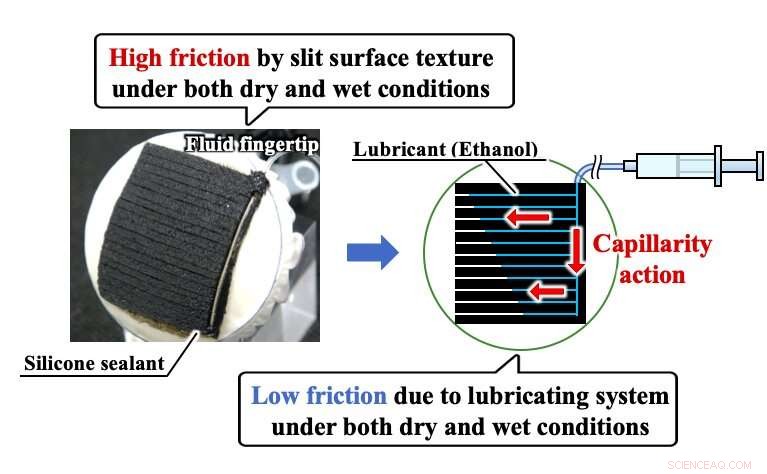
Una ilustración del concepto de dedo fluido de los investigadores. Crédito:Mizushima et al.
Investigadores de la Universidad de Kanazawa han desarrollado recientemente un sistema de reducción de la fricción basado en un efecto lubricante, que podría tener interesantes aplicaciones de robótica blanda. Su sistema, presentado en un artículo publicado en Taylor &Francis Robótica avanzada diario, podría ayudar al desarrollo de robots que puedan manipular objetos de manera eficiente tanto en condiciones secas como húmedas.
"Nuestra textura de superficie o piel desarrollada previamente para manos robóticas suaves proporciona una alta fricción tanto en condiciones secas como húmedas, "Tetsuyou Watanabe, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Sin embargo, esta alta fricción dificulta varios estilos de manipulación (incluida la liberación y el deslizamiento). En algunos casos, un objeto agarrado se pega a la superficie. Para superar este problema, desarrollamos un nuevo sistema de reducción de la fricción utilizando lubricantes ".
Al desarrollar su sistema, Watanabe y sus colegas se inspiraron en el comportamiento humano. Observaron que en los supermercados la gente suele lamerse los dedos para abrir bolsas o envases de plástico. También se realizan acciones similares cuando se intenta recoger hojas de papel o pasar las páginas de un libro.
Los investigadores encontraron que este comportamiento de 'lamerse los dedos' es particularmente común en personas de mediana edad o mayores, ya que el envejecimiento suele conducir a una piel más seca. Personas más jóvenes, por otra parte, a menudo no necesitan lamerse los dedos cuando intentan manipular plástico o papel, porque pueden controlar automáticamente la fricción de la piel a través de los mecanismos de sudor de su cuerpo.
"Por supuesto, el objetivo de lamer los dedos es conseguir una alta fricción, y totalmente diferente de nuestro propósito (es decir, reducción de la fricción), "Dijo Watanabe." Sin embargo, normalmente, el objetivo de los lubricantes es reducir la fricción en los sistemas mecánicos. Por lo tanto, consideramos la posibilidad de un sistema de reducción de la fricción similar al control del sudor en humanos ".
Los investigadores construyeron un dedo robótico que tiene ranuras en su superficie. Cuando se inyectan lubricantes (por ejemplo, etanol) alrededor de los límites de estas ranuras, impregnan toda la superficie, a través de una acción capilar.
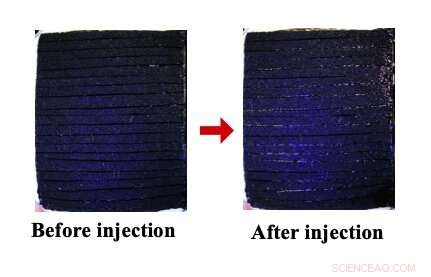
La yema del dedo antes y después de inyectarle etanol. Crédito:Mizushima et al.
"Utilizamos el área de superficie delgada, incluida la textura, y el sistema funciona no solo en cuerpos rígidos sino también deformables sin pérdida de adaptabilidad a la forma de un objeto, "Watanabe dijo." Por lo tanto, la principal ventaja de nuestro sistema es que la fricción de la superficie se puede controlar mientras se mantiene la deformabilidad y adaptabilidad de la superficie. Esto significa que el sistema desarrollado se puede instalar en robots con cuerpos blandos ".
En años recientes, el uso de cuerpos blandos se ha vuelto cada vez más popular en robótica, debido a su alta deformabilidad y adaptabilidad. Por ejemplo, los robots blandos pueden moverse más libremente en su entorno, sin presentar grandes daños al golpear paredes u obstáculos. Además, las manos robóticas suaves pueden adaptarse a la forma de un objeto mientras lo agarran, lo que permite estrategias de manipulación más avanzadas.
"Otra ventaja clave de nuestro sistema es que funciona tanto en condiciones secas como húmedas, "Añadió Watanabe." Por lo tanto, es muy útil para los robots que trabajan en entornos humanos, porque las tareas del hogar se realizan en ambas condiciones ".
Los investigadores integraron su sistema en la punta de un dedo robótico y evaluaron su desempeño en una serie de experimentos que involucraron agarrar y soltar objetos. Sus hallazgos sugieren que la técnica de lubricación que desarrollaron puede reducir efectivamente la fricción tanto en condiciones húmedas como secas.
"Como puede imaginarse por el comportamiento humano de lamerse los dedos, el agua puede aumentar la fricción y, en algunos casos, permitir que la piel se adhiera a las superficies, "Dijo Watanabe." En contraste, el etanol reduce la fricción. El factor importante para la reducción de la fricción es el coeficiente de dispersión estrechamente asociado con las fuerzas capilares (es decir, la tensión superficial) ".
En este contexto, una fuerza capilar baja implica la fácil difusión del líquido a través de una superficie. Usando etanol, que tiene una fuerza capilar baja, los investigadores pudieron reducir la fricción y esparcir fácilmente el lubricante por toda la superficie de la yema del dedo. Otra ventaja del etanol es su alta volatilidad, lo que reduce considerablemente el tiempo de tacto.
"También observamos que para facilitar el funcionamiento de nuestro sistema, la superficie no debe ser completamente lisa, "Añadió Watanabe." Una superficie que sea un poco rugosa o irregular puede mejorar aún más su función ".
Los robots pronto podrían apoyar a los humanos en una variedad de entornos, por ejemplo, ayudándoles con las tareas del hogar o proporcionándoles cuidados de enfermería. Como estas tareas se realizan generalmente tanto en condiciones secas como húmedas, El sistema de reducción de la fricción de los investigadores podría resultar muy útil.
"El manejo y la manipulación de objetos son los principales objetivos de nuestra investigación y luego las tareas que incluyen tales acciones son las aplicaciones específicas, ", Dijo Watanabe." Algunos ejemplos son doblar la ropa, Cocinando, Lavado, etc. "
En el futuro, el sistema de lubricación desarrollado por Watanabe y sus colegas podría informar el desarrollo de robots blandos que pueden manipular objetos de manera más efectiva, tanto en ambientes secos como húmedos. Los investigadores ahora están planeando más investigaciones destinadas a delinear y ampliar las posibles aplicaciones de su sistema.
"En la actualidad, solo hemos combinado las yemas de los dedos con nuestro sistema, ", Dijo Watanabe." Como siguiente paso, nos gustaría aplicar nuestro sistema de control de fricción a una mano robótica. Es más, las aplicaciones del sistema aún no están claras, por lo que nos gustaría esbozar metodologías adecuadas para operaciones reales, como doblar o cocinar ".
© 2019 Science X Network