Crédito:Chen et al.
Nanogeneradores, herramientas tecnológicas que pueden convertir energía mecánica o térmica en electricidad, vienen en tres diseños clave:piezoeléctrico, triboeléctrico y piroeléctrico. Mientras que los nanogeneradores piezoeléctricos y triboeléctricos pueden convertir la energía mecánica en electricidad, las piroeléctricas funcionan mediante la captación de energía térmica.
En los ultimos años, Los nanogeneradores tribolectricos se han vuelto cada vez más populares para aplicaciones de captación y detección de energía. Hasta aquí, sin embargo, su desempeño en tareas de percepción de información multidimensional y control interactivo ha sido bastante decepcionante.
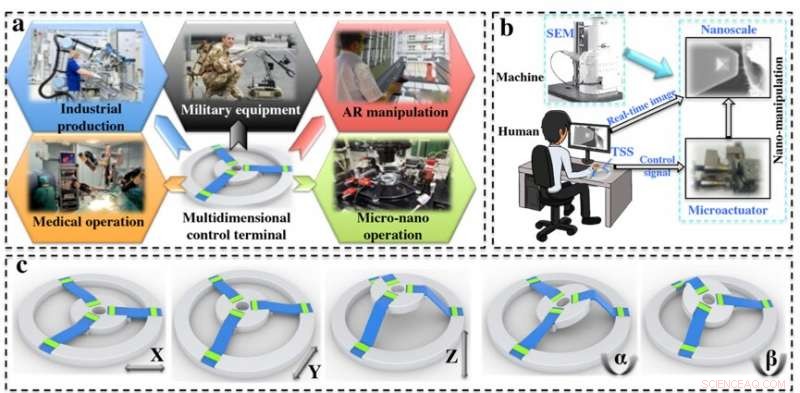
Investigadores de la Universidad Nacional de Singapur han desarrollado recientemente sensores para controlar objetos en el espacio 3D basados en nanogeneradores triboeléctricos. Estos sensores, presentado en un artículo publicado en Nano energía , están formados por una estructura paralela con tres bandas sensoras simétricas fijadas en su base y una platina móvil conectada a ellas.
"Con el desarrollo de la ciencia, Las tecnologías de automatización y robótica han penetrado en muchos aspectos de las actividades humanas. "Tao Chen, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Los robots no solo se utilizan ampliamente en líneas de producción automáticas y campos de entretenimiento, pero también puede tener médico, aplicación aeroespacial y militar, así como muchos otros. Sin embargo, hay inaccesibles, desafíos imprevisibles peligrosos o inevitables para que los humanos interactúen o realicen tareas complejas en entornos donde el equipo se mantiene en el vacío, submarino, escala espacial y nanométrica, etc. "
Para permitir interacciones efectivas entre humanos y sistemas automatizados, Los investigadores han desarrollado terminales de control que pueden operarse de diversas formas, como pantallas táctiles, teclados o estructuras de balancines. En la mayoría de los casos, estos mecanismos de control son indirectos, por lo tanto, necesitan análisis y cálculos de instrucciones complejos para corresponder con el estado de movimiento del objeto a manipular.
"En este papel, presentamos un sensor de banda triboeléctrica ultraestirable (TSS) para controlar las actitudes del objeto en el espacio, ", Explicó Chen." Nuestro TSS podría mejorar el rendimiento de los robots en una variedad de entornos, incluyendo submarino, espacio y más ".
En su estudio, Chen y sus colegas utilizaron una tira triboleeléctrica ultraestirable como sensor espacial, lo que finalmente permite a los robots controlar objetos en el espacio 3D. Debido al efecto de acoplamiento de la triboelectrificación y la inducción electrostática, la longitud de la tira cambia, con el mismo punto de contacto con los dedos generando diferentes relaciones de salida de señal de dos electrodos terminales (E1 y E2). Estos electrodos funcionan como la interfaz interactiva para la detección y el control multidimensionales.
"Un extremo del electrodo E1 de la tira está fijo, mientras que el electrodo E2 es móvil bajo tensión de tracción con respecto a E1, "Dijo Chen." La relación de voltaje de salida de los dos electrodos (VE2 / VE1) se obtiene durante el contacto y separación del dedo y la goma de silicona con una distancia constante de E1. Es más, la tira se estira una cierta longitud, la disminución de la relación de voltaje se determina cuando volvemos a tocar la misma posición (punto de referencia) a una distancia constante con respecto al electrodo E1 ".
A medida que aumenta la longitud de estiramiento de la tira, esta relación de voltaje disminuye. El mecanismo utilizado por Chen y sus colegas les permitió medir la longitud extendida del lado E2 de la tira, tocando el punto de referencia que se fija desde E1. En otras palabras, el desplazamiento de su tira mientras se estira, su velocidad de estiramiento y la aceleración del electrodo E2 pueden medirse con una frecuencia de contacto constante.
"El principio de detección del sensor utilizado aquí es principalmente determinar la longitud comparando la relación de voltaje entre los dos electrodos, "Chen dijo." En consecuencia, el mecanismo de detección que utiliza el método de relación de voltaje evita la influencia de la humedad ambiental y la fuerza desigual. Entonces, este es un método de detección eficaz para evitar la inestabilidad y la interferencia ".
Chen y sus colegas introdujeron un nuevo método de detección de objetos basado en un sensor de movimiento longitudinal que utiliza relaciones de voltaje generadas. En su estudio, utilizaron tres sensores flexibles autoamplificados para lograr una proyección de posicionamiento 5D en el espacio. Su método es más simple e intuitivo que las estructuras rígidas (no estirables) tradicionales subyacentes, sin embargo, también agrega dimensiones espaciales.
"En el presente, el funcionamiento de la nanoescala usando el modo de manejo o clave no es intuitivo, ", Dijo Chen." Nuestro enfoque puede ser más flexible e intuitivo para las interacciones entre humanos y máquinas a nanoescala ".
En una demostración preliminar, los investigadores utilizaron su dispositivo TSS como terminal de nanomáquina humana para controlar su nanomanipulador en una tarea de microscopía electrónica de barrido (SEM). En esta tarea, su dispositivo les permitió operar los nanotubos de carbono y completar con éxito la extracción de nanotubos de carbono.
"Los resultados de la micro-nano manipulación que recopilamos confirman el excelente rendimiento del dispositivo TSS en aplicaciones de percepción y control, que son relevantes para campos como la robótica, VR e IoT, ", Dijo Chen." En un estudio de seguimiento, planeamos llevar a cabo una investigación sobre el controlador de dos manos, para lograr una interacción hombre-máquina más intuitiva y conveniente ".
© 2019 Science X Network