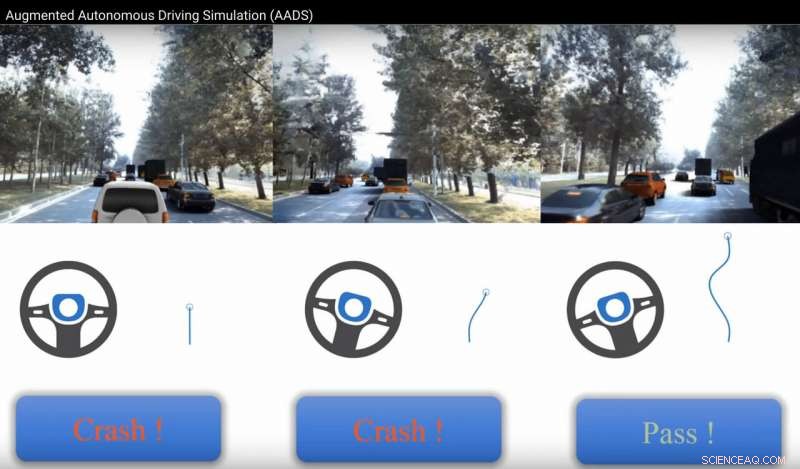
El sistema de simulación de conducción autónoma aumentada (AADS) combina fotos, videos, y nubes de puntos LIDAR para una representación realista de la escena con datos de trayectoria del mundo real que se pueden utilizar para predecir el comportamiento de conducción y las posiciones futuras de otros vehículos o peatones en la carretera. Crédito:Li et. Alabama, 2019
El científico informático de la Universidad de Maryland Dinesh Manocha, en colaboración con un equipo de colegas de Baidu Research y la Universidad de Hong Kong, ha desarrollado un sistema de simulación fotorrealista para la formación y validación de vehículos autónomos. El nuevo sistema proporciona una simulación más auténtica que los sistemas actuales que utilizan motores de juegos o gráficos de computadora de alta fidelidad y patrones de tráfico representados matemáticamente.
Su sistema, llamada simulación de conducción autónoma aumentada (AADS), podría hacer que la tecnología de conducción autónoma sea más fácil de evaluar en el laboratorio y, al mismo tiempo, garantizar una seguridad más confiable antes de que comiencen las costosas pruebas en carretera.
Los científicos describieron su metodología en un artículo de investigación publicado el 27 de marzo de 2019 en la revista Ciencia Robótica .
"Este trabajo representa un nuevo paradigma de simulación en el que podemos probar la confiabilidad y seguridad de la tecnología de conducción automática antes de implementarla en automóviles reales y probarla en las carreteras o carreteras de la ciudad". "dijo Manocha, uno de los autores correspondientes del artículo, y un profesor con nombramientos conjuntos en informática, ingeniería Eléctrica y Computación, y el Instituto de Estudios Informáticos Avanzados de la Universidad de Maryland.
Un beneficio potencial de los vehículos autónomos es que podrían ser más seguros que los conductores humanos que tienden a distraerse. fatiga y decisiones emocionales que conducen a errores. Pero para garantizar la seguridad, Los vehículos autónomos deben evaluar y responder al entorno de conducción sin falta. Dadas las innumerables situaciones que puede encontrar un automóvil en la carretera, Un sistema de conducción autónomo requiere cientos de millones de millas de pruebas de manejo en condiciones desafiantes para demostrar confiabilidad.
Si bien eso podría llevar décadas lograrlo en la carretera, las evaluaciones preliminares podrían realizarse rápidamente, de manera más eficiente y segura mediante simulaciones por computadora que representan con precisión el mundo real y modelan el comportamiento de los objetos circundantes. Los actuales sistemas de simulación de vanguardia descritos en la literatura científica se quedan cortos en retratar entornos fotorrealistas y presentar patrones de flujo de tráfico o comportamientos de los conductores en el mundo real.
AADS es un sistema basado en datos que representa con mayor precisión las entradas que recibiría un automóvil autónomo en la carretera. Los coches autónomos se basan en un módulo de percepción, que recibe e interpreta información sobre el mundo real, y un módulo de navegación que toma decisiones, tales como hacia dónde dirigir o si frenar o acelerar, basado en el módulo de percepción.
En el mundo real, el módulo de percepción de un automóvil autónomo generalmente recibe información de cámaras y sensores lidar, que utilizan pulsos de luz para medir distancias de los alrededores. En la tecnología actual de simuladores, el módulo de percepción recibe información de imágenes generadas por computadora y patrones de movimiento modelados matemáticamente para peatones, bicicletas y otros coches. Es una representación relativamente burda del mundo real. También es costoso y requiere mucho tiempo de creación porque los modelos de imágenes generados por computadora deben generarse a mano.

La síntesis de nuevos antecedentes. Se utilizó un método de "costura" para hacer una imagen completa (izquierda). La vista final se sintetizó después de los procesos de posprocesamiento, como el relleno de agujeros y la mezcla de colores. Crédito:Li et al., Sci. Robot. 4, eaaw0863 (2019)
El sistema AADS combina fotos, videos, y nubes de puntos LIDAR, que son como representaciones de formas tridimensionales, con datos de trayectoria del mundo real para peatones, bicicletas y otros coches. Estas trayectorias se pueden utilizar para predecir el comportamiento de conducción y las posiciones futuras de otros vehículos o peatones en la carretera para una navegación más segura.
"Estamos renderizando y simulando el mundo real visualmente, usando videos y fotos, "dijo Manocha, "pero también estamos capturando el comportamiento real y los patrones de movimiento. La forma en que los humanos conducen no es fácil de capturar mediante modelos matemáticos y leyes de la física. Entonces, extrajimos datos sobre trayectorias reales de todos los videos que teníamos disponibles, y modelamos conductas de conducción utilizando metodologías de ciencias sociales. Este enfoque basado en datos nos ha proporcionado un simulador de tráfico mucho más realista y beneficioso ".
Los científicos tuvieron que superar un desafío de larga data al usar imágenes de video reales y datos LIDAR para su simulación:cada escena debe responder a los movimientos de un automóvil autónomo, aunque esos movimientos pueden no haber sido capturados por la cámara original o el sensor lidar. Cualquier ángulo o punto de vista que no sea capturado por una foto o video debe ser renderizado o simulado usando métodos de predicción. Esta es la razón por la que la tecnología de simulación siempre se ha basado tanto en gráficos generados por computadora y técnicas de predicción basadas en la física.
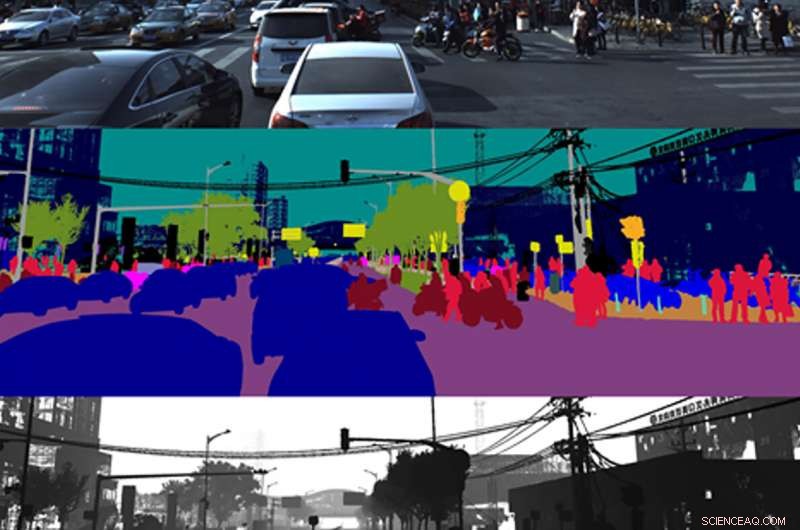
El conjunto de datos producido por el sistema AADS, incluyendo imágenes RGB (arriba), anotaciones de diferentes objetos (centro), y una nube de puntos (un conjunto de puntos de datos en el espacio). Crédito:Li et al., Sci. Robot. 4, eaaw0863 (2019)
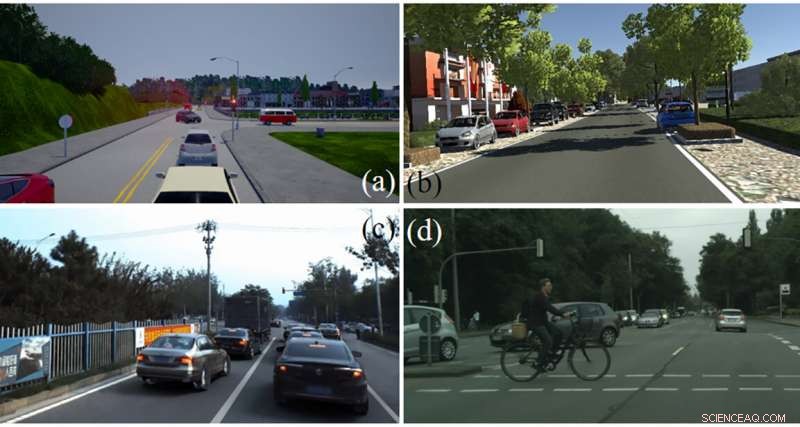
El método AADS produjo una imagen (esquina inferior izquierda) que es visualmente más similar a una imagen real de CityScapes (parte inferior derecha), un conjunto de datos robusto de escenas de calles urbanas, que a CARLA (arriba a la izquierda), el simulador de realidad virtual más reciente y popular para la conducción autónoma, o el conjunto de datos completamente sintético VKITTI (arriba a la derecha). Crédito:Li et al., Sci. Robot. 4, eaaw0863 (2019)
Para superar este desafío, Los investigadores desarrollaron una tecnología que aísla los diversos componentes de una escena callejera del mundo real y los convierte en elementos individuales que pueden resintetizarse para crear una multitud de escenarios de conducción fotorrealistas.
Con AADS, Los vehículos y peatones pueden levantarse de un entorno y colocarse en otro con la iluminación y los patrones de movimiento adecuados. Las carreteras se pueden recrear con diferentes niveles de tráfico. Los múltiples ángulos de visión de cada escena proporcionan perspectivas más realistas durante los cambios de carril y los giros. Además, La tecnología avanzada de procesamiento de imágenes permite transiciones suaves y reduce la distorsión en comparación con otras técnicas de simulación de video. Las técnicas de procesamiento de imágenes también se utilizan para extraer trayectorias, y así modelar los comportamientos de los conductores.
"Debido a que usamos videos del mundo real y movimientos del mundo real, nuestro módulo de percepción tiene información más precisa que los métodos anteriores, "Dijo Manocha." Y luego, por el realismo del simulador, podemos evaluar mejor las estrategias de navegación de un sistema de conducción autónomo ".
Manocha dijo que al publicar este trabajo, los científicos esperan que algunas de las corporaciones que desarrollan vehículos autónomos incorporen el mismo enfoque basado en datos para mejorar sus propios simuladores para probar y evaluar sistemas de conducción autónoma.