Crédito:Kanellakis et al.
Un equipo de investigadores de la Universidad Tecnológica de Luleå, en Suecia, ha desarrollado un nuevo marco para realizar inspecciones visuales de grandes infraestructuras 3-D utilizando microvehículos aéreos (MAV) totalmente autónomos. En su papel prepublicado en arXiv, introducen un sistema de inspección aérea con altos niveles de autonomía, que potencialmente podría desplegarse a gran escala para la inspección de infraestructuras antiguas.
"El envejecimiento de la infraestructura se está convirtiendo en un problema importante para las sociedades desarrolladas, con un mayor costo y un gran peligro para los inspectores humanos que realizan la operación general, "George Nikolakopoulos, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Por lo tanto, hace cinco años, imaginamos robots aéreos con brazos para realizar inspecciones y mantenimiento autónomos de una manera más asequible, rápido, forma productiva y segura ".
En el marco ideado por Nikolakopoulos y sus colegas, se implementan múltiples MAV para la inspección de una infraestructura, confiando únicamente en su computadora a bordo y sistemas sensoriales. Un sistema modular que combina localización, La tecnología de planificación y mapeo de rutas garantiza que los MAV se puedan implementar rápidamente, reduciendo el tiempo de ejecución de la misión para que satisfaga las necesidades del operador.
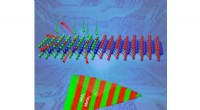
"Dado un proyecto de modelo geométrico de la infraestructura a inspeccionar, p.ej. una caja o un cono, definimos con nuestros algoritmos rutas para los MAV que pueden garantizar una inspección visual completa, "Nikolakopoulos explicó." Los robots aéreos vuelan de forma autónoma, recopilar imágenes evitando colisiones. Al aterrizar, la información recopilada se transforma en una densa reconstrucción tridimensional de la infraestructura ".
El sistema desarrollado por Nikolakopoulos y sus colegas incluye tres componentes clave:un planificador de ruta basado en geometría, un componente de localización preciso y flexible, y un esquema de posprocesamiento de datos visuales. El componente del planificador de rutas planifica de manera eficaz la cobertura colaborativa de estructuras complejas utilizando múltiples MAV.

Crédito:Kanellakis et al.
El componente de localización, por otra parte, proporciona estimaciones de pose precisas para los MAV utilizando un esquema de estimación inercial fusionada de banda ultraancha (UWB). Finalmente, el esquema de posprocesamiento permite a los investigadores construir modelos tridimensionales de las infraestructuras, utilizando los datos visuales recopilados por los vehículos aéreos.
"El mayor impacto científico y tecnológico de nuestro estudio es el hecho de que los múltiples MAV están operando en un enfoque no supervisado por humanos, "Dijo Nikolakopoulos." Tienen un nivel muy alto de autonomía y una fabricación industrial completa para realizar las tareas de inspección requeridas. Según entiendo, esta es la primera vez que se implementan MAV para la inspección de turbinas eólicas en todo el mundo ".
Nikolakopoulos y sus colegas evaluaron el rendimiento de su sistema de navegación autónomo en una serie de experimentos de campo al aire libre realistas que implicaron la inspección de infraestructuras a gran escala. Estas pruebas se centraron principalmente en la inspección de aerogeneradores, que son estructuras particularmente desafiantes.
Los resultados recogidos en estas evaluaciones preliminares son muy prometedores, destacando los méritos y potencialidades del sistema propuesto para la inspección de grandes y complejas infraestructuras. En el futuro, el enfoque desarrollado por Nikolakopoulos y sus colegas podría implementarse a gran escala, allanando el camino hacia inspecciones totalmente automatizadas utilizando robótica aérea.
"Ahora estamos en la etapa de comercializar la idea general como servicio y plataforma, por lo tanto, estamos trabajando de lleno en la construcción de nuestra escisión y el fortalecimiento de los planes financieros futuros, "Dijo Nikolakopoulos.
© 2019 Science X Network