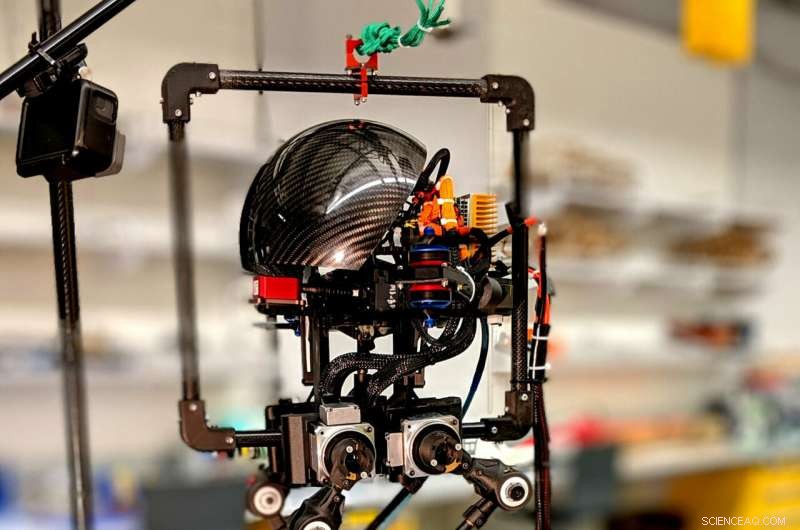
Leo mide aproximadamente dos pies y medio de altura, en delgado piernas flexionadas. Crédito:Alireza Ramezani, Soon-Jo Chung, y Morteza Gharib
Un robot bípedo camina sobre la superficie de un planeta distante. Sus sensores escanean el medio ambiente, enviando datos a la Tierra. Llega a una ladera que se desmorona flexiona las rodillas y salta, propulsores zumbando, para aterrizar con seguridad sobre la roca suelta.
Este futuro es todavía un sueño lejano pero Alireza Ramezani, profesor asistente de ingeniería eléctrica e informática en Northeastern, lo ha acercado un paso más con su nuevo robot.
El robot se conoce como LEONARDO, un acrónimo de LEg ON Aerial Robotic DrOne, o Leo para abreviar. Tiene una capacidad que la mayoría de los robots en estos días simplemente no tienen:puede caminar y volar.
"Inicialmente, fue desarrollado con la idea de diseñar exploradores:sistemas que pueden combinar movilidad con patas y movilidad aérea rápida para realizar exploraciones autónomas, "Dijo Ramezani.
Leo mide aproximadamente dos pies y medio de altura, en delgado piernas flexionadas. Con una carrocería hecha principalmente de fibra de carbono, el robot es fuerte, pero pesa solo seis libras. Tiene propulsores a ambos lados de lo que Ramezani llama el torso. Estos pueden proporcionar empuje en cualquier dirección, y son lo suficientemente potentes para volar. Pero esa no es su función principal.
"La idea no es crear un quadcopter, ", Dijo Ramezani." La idea es tener una máquina que pueda apalancar sus patas y los propulsores para, por ejemplo, mejorar su capacidad de salto ".
Los propulsores también pueden ayudar a estabilizar el robot en superficies irregulares. o cógelo si empieza a caer.
"Este es el mayor desafío para los sistemas de patas, o incluso humanos:podemos estabilizar nuestro cuerpo, pero a veces caemos "Dijo Ramezani." ¿Y si pudiéramos tener un robot que nunca cae? "
Ramezani comenzó a estudiar sistemas robóticos con patas durante su trabajo de posgrado en la Universidad de Michigan. Los robots que caminan a menudo luchan en terrenos accidentados. En el momento, se preguntó si habría alguna forma de desplegar una bolsa de aire para amortiguar la caída de un robot. Ahora ha diseñado un robot que se puede atrapar solo.
La idea surgió de la observación de aves, Dijo Ramezani. La mayoría de los diseños robóticos se centran exclusivamente en un tipo de locomoción, pero los pájaros pueden caminar, mosca, e incluso correr.
"Puedes ver la ingeniería a la perfección en la naturaleza, y podemos aprender mucho "dijo Ramezani, quien también ha construido un robot volador basado en las acrobacias aéreas de los murciélagos. "Eso ha sido una inspiración para mí en casi todos mis diseños".
Cuando Ramezani se unió a Northeastern el pasado otoño, Leo se quedó en el Instituto de Tecnología de California, donde Ramezani había sido investigador postdoctoral. Planea construir una versión actualizada del robot en Boston, para que los estudiantes del noreste lo utilicen como plataforma de aprendizaje.
"En este punto, Veo esto como una muy buena plataforma para impulsar la robótica ágil. Piense en un robot que literalmente nunca se cae:puede sortear terrenos accidentados, eso puede volar, Puede saltar. Un sistema ultra-capaz, ", Dijo Ramezani." En el camino, podemos utilizar una máquina como ésta para la exploración ".