Autosub Long Range 6000 AUV del Centro Nacional de Oceanografía, antes del despliegue bajo la plataforma de hielo FilchnerRonne en la Antártida. Crédito:Sprague et al.
Investigadores del Real Instituto de Tecnología (KTH) y el Centro Nacional de Oceanografía han utilizado recientemente árboles de comportamiento (BT) para diseñar módulos, versátil, y arquitecturas de control robustas para misiones críticas. Su estudio, prepublicado en arXiv, aplicó específicamente un marco BT al sistema de control de vehículos submarinos autónomos (AUV).
Los AUV son vehículos submarinos que se utilizan para una variedad de misiones, tales como detectar y mapear objetos sumergidos o identificar peligros y obstrucciones para la navegación. Debido a las limitaciones en su ancho de banda y rango de comunicación, estos vehículos no pueden confiar en las soluciones de teleoperación utilizadas por robots aéreos o terrestres.
Es más, Los AUV generalmente se implementan en áreas remotas, por lo que recuperarlos después de un mal funcionamiento suele ser muy difícil y costoso. Para hacer frente a estos desafíos, Los sistemas de control AUV deben ser robustos y versátiles, velando por la seguridad del vehículo y adaptándose a diferentes situaciones.
El equipo de investigadores de KTH y el Centro Nacional de Oceanografía intentó abordar estos desafíos utilizando árboles de comportamiento (BT), modelos matemáticos que recientemente se han vuelto cada vez más populares en el campo de la inteligencia artificial y la robótica. Los BT se desarrollaron inicialmente para videojuegos con el fin de aumentar la modularidad de las estructuras de control de personajes no jugadores (NPC).
"Esta modularidad permite realizar pruebas eficientes, diseño de funcionalidad incremental y reutilización de código, todos los cuales han sido bastante ventajosos en la industria de los videojuegos, "Christopher Iliffe Sprague, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Similar, consideramos que estos aspectos son bastante útiles en el diseño de inteligencia artificial robótica (IA), los beneficios clave son que los comportamientos se pueden reutilizar y probar en el contexto de otros comportamientos de nivel superior sin especificar su relación con los comportamientos posteriores. Estos son beneficios sorprendentes en comparación con las máquinas de estados finitos que se utilizan de forma más convencional ".
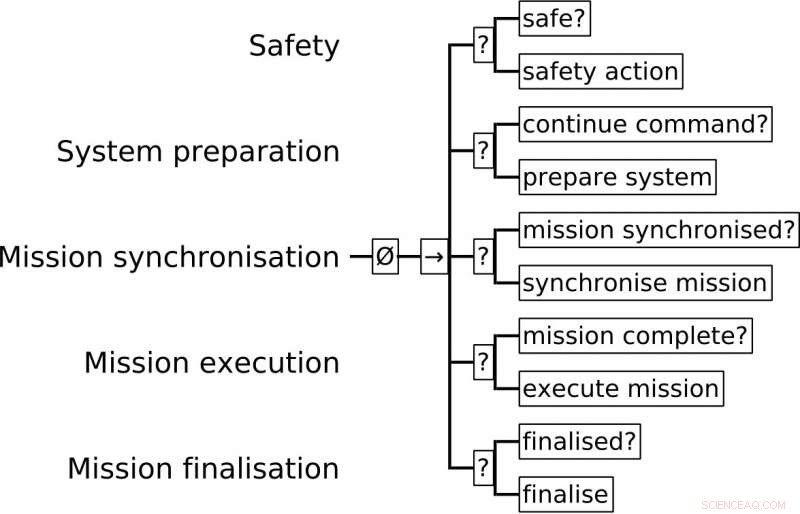
Sistema de misión crítica general BT. La robustez se logra comprobando siempre las condiciones de seguridad y tomando las medidas adecuadas cuando sea necesario. Crédito:Sprague et al.
Esencialmente, Los BT proporcionan una estructura jerárquica para cambiar entre varias tareas. En sistemas de misión crítica, como vehículos de reconocimiento o vehículos autónomos, un objetivo exagerado a menudo se puede dividir en varias subtareas. Por lo tanto, Los BT podrían ayudar a estructurar mejor estas tareas y cambiar entre ellas.
"Con la estructura jerárquica inherente de los BT, las tareas se pueden descomponer en un grado variable de especificidad, "Sprague explicó." En nuestro periódico, mostramos esto en el contexto de los AUV que tienen la tarea de ejecutar una misión definida por una secuencia de puntos de referencia. En primer lugar, generalmente definimos un BT que cumpla con los requisitos del dominio del sistema (es decir, vehículos submarinos), luego, refine aún más el BT agregando subtareas relacionadas con objetivos específicos ".
Sprague y sus colegas aplicaron este proceso de refinamiento de BT a una misión AUV llevada a cabo por el Instituto Nacional de Oceanografía. Su marco BT hizo que los sistemas de control AUV fueran más robustos, supervisar su seguridad antes de continuar con otras tareas posteriores. Los BT también permitieron una mayor versatilidad, priorizar las subtareas y permitir que el sistema cambie de forma flexible entre ellas.
"El resultado más significativo de nuestro estudio es que hemos demostrado cómo los árboles de comportamiento se pueden delinear primero para cumplir con los requisitos generales del dominio y luego refinarlos aún más para misiones específicas, sin sacrificar la estructura del árbol original, ", Dijo Sprague." La conclusión crucial de esto es que uno puede inculcar ciertas prioridades de tareas, la seguridad es lo más importante, y conservarlos sin importar cuán específico de la misión se vuelva el árbol ".
Sprague y sus colegas han demostrado con éxito las ventajas de utilizar BT para controlar sistemas de misión crítica, como AUV. Sin embargo, el grado en que las tareas se pueden abstraer utilizando BT todavía está limitado por la capacidad de los humanos para identificar descomposiciones de tareas. Aunque en algunos casos las tareas se pueden desglosar de forma intuitiva, en otros, los comportamientos del sistema son mucho más complejos.
"Ahora buscamos sintetizar automáticamente BT a partir del ejemplo, con la optimización en mente, "Dijo Sprague." En otro artículo, Investigamos cómo implementar un control óptimo con métodos de aprendizaje automático para tareas específicas. Ahora nos gustaría investigar el uso de tales métodos para identificar y optimizar las tareas y las estructuras generales del árbol a partir del ejemplo. Sospechamos que esto revelará comportamientos que son difíciles de identificar para los humanos ".
© 2018 Science X Network