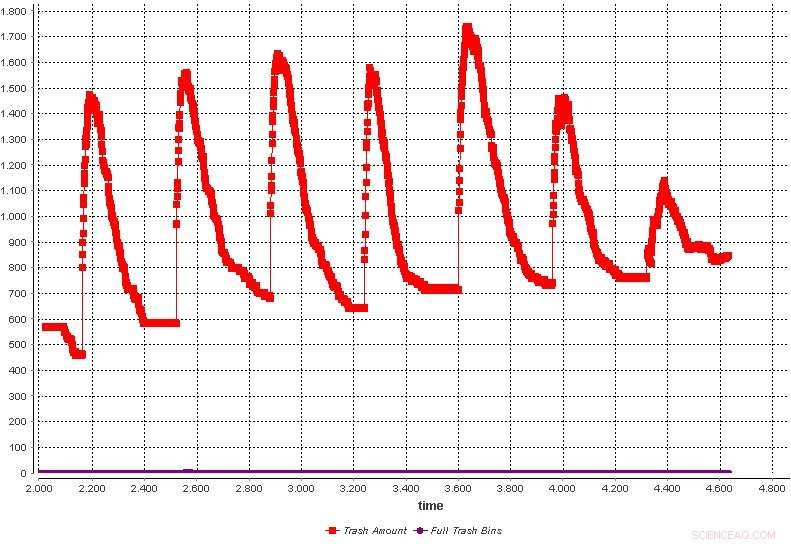
Imagen que muestra la rapidez con la que se elimina el vertido de basura nueva en el entorno urbano. Crédito:Alfeo et al.
Investigadores del MIT Media Lab, la Universidad de Pisa, y la Université Libre de Bruxelles han explorado recientemente la viabilidad de utilizar sistemas robóticos de enjambre para la gestión autónoma de residuos. Su enfoque descrito en un artículo publicado previamente en arXiv, aplica métodos de búsqueda de alimentos bioinspirados a la robótica de enjambres, con el objetivo de mejorar la eficiencia y autonomía de la gestión de residuos en las ciudades.
"Con vehículos autónomos, enjambres de drones para entregas y equipos de robots que organizan almacenes, la ciudad del futuro será un ecosistema cibernético formado por máquinas y humanos, "Antonio Luca Alfeo, uno de los investigadores que llevó a cabo el estudio le dijo a Tech Xplore. "Este es un escenario fascinante, así como un gran desafío tecnológico. La gestión de tales sistemas da como resultado una complejidad que crece exponencialmente a medida que se implementan más máquinas, especialmente si queremos que realmente 'vivan con nosotros' y reaccionen de forma autónoma a las necesidades cambiantes de su entorno ".
La naturaleza ofrece varios ejemplos de cómo problemas de convivencia similares pueden resolverse de manera brillante y eficaz. En su estudio, los investigadores intentaron aplicar estas soluciones inspiradas en la naturaleza a la gestión de enjambres de robots.
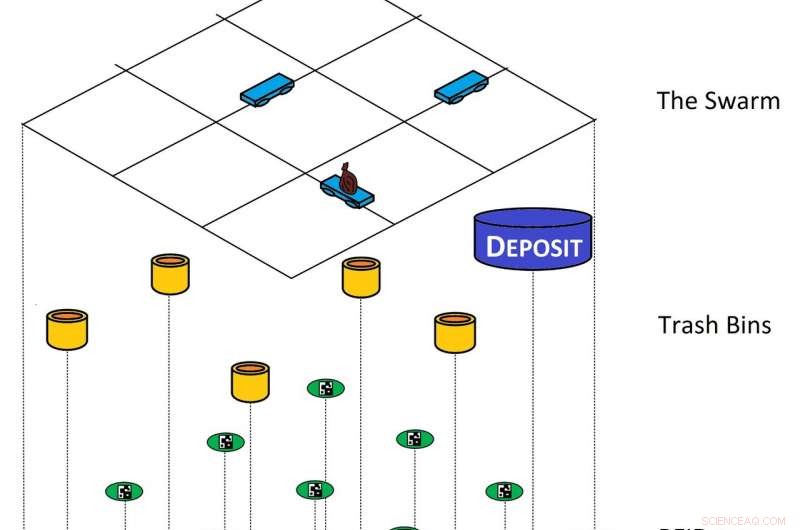
"Proponemos un sistema de eliminación de basura con enjambres de robots cuya autoorganización se basa en el comportamiento de los insectos sociales, también conocido como forrajeo basado en estigmergia, "Alfeo explicó." El sistema propuesto se ocupa de la eliminación de basura, desde cubos de basura hasta algunos depósitos centrales ".
"Feromonas virtuales" liberadas por otros robots en etiquetas RFID en el entorno urbano. Crédito:Alfeo et al.
Los robots desarrollados por Alfeo y sus colegas no están controlados ni reciben instrucciones de un servicio remoto. En lugar de, todas sus decisiones se toman en el impulso del momento, en función de sus percepciones y observaciones en tiempo real.
"Entre estas percepciones, también hay 'feromonas virtuales' liberadas por otros robots en etiquetas RFID en el entorno urbano, "Dijo Alfeo." Estos marcan el camino más conveniente desde uno o más contenedores de basura no vacíos y el depósito más cercano. Más importante, gracias a su comportamiento colectivo, el enjambre es capaz de autoorganizarse de forma autónoma para apuntar a las áreas con mayor cantidad de basura, siempre dando una respuesta eficaz ".
El diseño de esta innovadora solución requirió una amplia variedad de habilidades y cubrió diferentes áreas de especialización. El equipo que lo desarrolló es, por tanto, muy interdisciplinario, con experiencia en ciencias de la ciudad, robótica bioinspirada, y ciencia de datos.
"Los miembros del equipo especializado en ciencia de la ciudad proporcionaron el modelo del robot utilizado en el estudio y se ocuparon del modelado del espacio urbano en GAMA, una plataforma de simulación de múltiples agentes, ", Dijo Alfeo." Los expertos en el diseño de comportamiento de enjambres de robots se dieron cuenta y probaron la lógica del enjambre en un modelo adecuadamente aumentado del entorno urbano. Finalmente, el análisis de las implicaciones de cada elección de diseño fue supervisado por científicos de datos altamente competentes ".
Alfeo y sus colegas evaluaron su sistema de enjambres para la gestión de residuos y descubrieron que superaba los enfoques existentes. Su estudio también ofreció información valiosa sobre cómo diseñar y personalizar mejor los sistemas robóticos de enjambre.
"Demostramos que un enjambre de robots autoorganizados podría conducir a grandes mejoras en el contexto de la gestión de residuos, sin ninguna fuente de información externa o conocimiento previo sobre la demanda de eliminación de basura, "Dijo Alfeo." Además, proporcionamos información sobre el diseño de dicho sistema con el objetivo de equilibrar sus dos propiedades principales, es decir, la capacidad exploratoria y la capacidad de respuesta del enjambre. El primero puede reducir la aparición de contenedores de basura llenos, mientras que este último ayuda a reducir la cantidad de basura en el entorno urbano ".
La investigación llevada a cabo por Alfeo y sus colegas es un ejemplo fascinante y útil de cómo los sistemas de robótica de enjambres podrían aplicarse en entornos urbanos. Sus resultados son muy prometedores, abriendo nuevas posibilidades interesantes que podrían explorarse más en el futuro.
"El enfoque propuesto no es específico para la gestión de residuos y podría probarse en varias aplicaciones diferentes, como los vehículos autónomos, "Dijo Alfeo." Dado que en este caso la seguridad es un factor crítico, sin embargo, el diseño de dicho sistema debería incluir más soluciones específicas, como la tecnología de cadena de bloques ".
© 2018 Science X Network