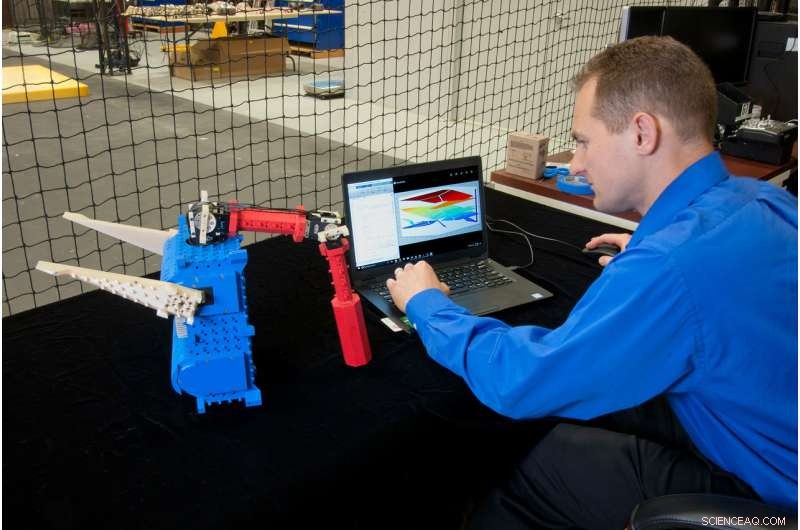
Dr. Chad Kessens, un especialista en robótica del Laboratorio de Investigación del Ejército de EE. UU. en Aberdeen Proving Ground, Maryland., presenta ideas innovadoras para futuros robots militares. Crédito:Laboratorio de Investigación del Ejército
Los científicos del Laboratorio de Investigación del Ejército de EE. UU. Y del Laboratorio de Física Aplicada de la Universidad Johns Hopkins han desarrollado un software para garantizar que si un robot cae, puede volver a levantarse, lo que significa que los futuros robots militares dependerán menos de sus manejadores Soldier.
Basado en los comentarios de los soldados en un curso de capacitación del ejército, El investigador de ARL, el Dr. Chad Kessens, comenzó a desarrollar software para analizar si un robot dado podría "volver a ponerse de pie" desde cualquier orientación invertida.
"Un soldado me dijo que valoraba mucho a su robot, salió de su vehículo para rescatar al robot cuando no pudo darle la vuelta, ", Dijo Kessens." Esa es una historia que no quiero volver a escuchar nunca más ".
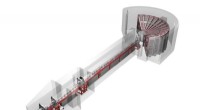
Investigadores de la Armada PMS-408 (Misiones Expedicionarias) y su brazo técnico, la División de Tecnología de Eliminación de Artefactos Explosivos de Indian Head, de acuerdo. Se asociaron con JHU / APL y el contratista principal, Northrop Grumman Remotec, para desarrollar el sistema robótico avanzado de eliminación de artefactos explosivos, o AEODRS, una nueva familia de sistemas robóticos EOD con una arquitectura modular de sistemas abiertos. Una plataforma ligera para mochileros, que es un incremento del programa, Se espera que entre en producción a finales de este año. Un requisito fundamental del programa es que los robots deben poder autoadrizarse.
"Estos robots existen para mantener a los soldados fuera de peligro, "dijo Reed Young, Responsable del Programa de Robótica y Autonomía en JHU / APL. "El autoadrizamiento es una capacidad crítica que sólo promoverá ese propósito".
Evaluar la capacidad del sistema AEODRS para auto-derecho, JHU / APL se asoció con ARL para aprovechar el software desarrollado por Kessens. El equipo pudo extender su capacidad a robots con un mayor número de articulaciones (o grados de libertad) gracias a la experiencia del investigador de JHU / APL Galen Mullins en técnicas de muestreo adaptativo.
"El análisis en el que he estado trabajando analiza todas las posibles geometrías y orientaciones en las que el robot podría encontrarse, ", Dijo Kessens." El problema es que cada articulación adicional agrega una dimensión al espacio de búsqueda, por lo que es importante buscar en los lugares correctos los estados estables y las transiciones. De lo contrario, la búsqueda podría tardar demasiado ".

Los investigadores exploran nuevas técnicas utilizando la plataforma Increment 1 del sistema robótico avanzado de eliminación de artefactos explosivos. Crédito:Laboratorio de Investigación del Ejército
Kessens dijo que el trabajo de Mullins es lo que permitió que el análisis funcionara de manera eficiente para analizar sistemas de mayor grado de libertad. Si bien el trabajo de Kessens determina qué buscar y cómo, Mullins averigua dónde buscar ".
"Este análisis fue posible gracias a nuestra herramienta de planificación contradictoria de rango recientemente desarrollada, o RAPT, un marco de software para probar sistemas autónomos y robóticos, ", Dijo Mullins." Originalmente desarrollamos el software para vehículos submarinos, pero cuando Chad explicó su enfoque del problema de la autocorrección, Inmediatamente vi cómo estas tecnologías podrían funcionar juntas ".
Dijo que la clave de este software es un algoritmo de muestreo adaptativo que busca transiciones.
"Para este trabajo, buscábamos estados en los que el robot pudiera pasar de una configuración estable a una inestable, provocando que el robot se vuelque, "Explicó Mullins." Mis técnicas fueron capaces de predecir con eficacia dónde podrían estar esas transiciones para que pudiéramos buscar en el espacio de manera eficiente ".
Por último, el equipo pudo evaluar los ocho grados de libertad de los sistemas AEODRS y determinó que puede enderezarse en un terreno nivelado sin importar en qué estado inicial se encuentre. El análisis también genera planes de movimiento que muestran cómo el robot puede reorientarse. Los hallazgos del equipo se pueden encontrar en "Evaluación de las capacidades de autocorrección de un robot mediante muestreo adaptativo, "publicado en IEEE's Letras de robótica y automatización en agosto.
Más allá de la evaluación de cualquier robot específico, Kessens considera que el marco de análisis es importante para la capacidad de los militares de comparar robots de diferentes proveedores y seleccionar el mejor para comprar.
"El Ejército y la Armada quieren robots que puedan auto-derecho, pero todavía estamos trabajando para comprender y evaluar lo que eso significa, "Dijo Kessens." ¿Derecho propio bajo qué condiciones? Hemos desarrollado un análisis métrico para evaluar la capacidad de un robot para autoderezarse en un terreno plano inclinado, e incluso podríamos utilizarlo como herramienta para mejorar el diseño de robots. Nuestro siguiente paso es determinar de qué es capaz un robot en un terreno irregular ".