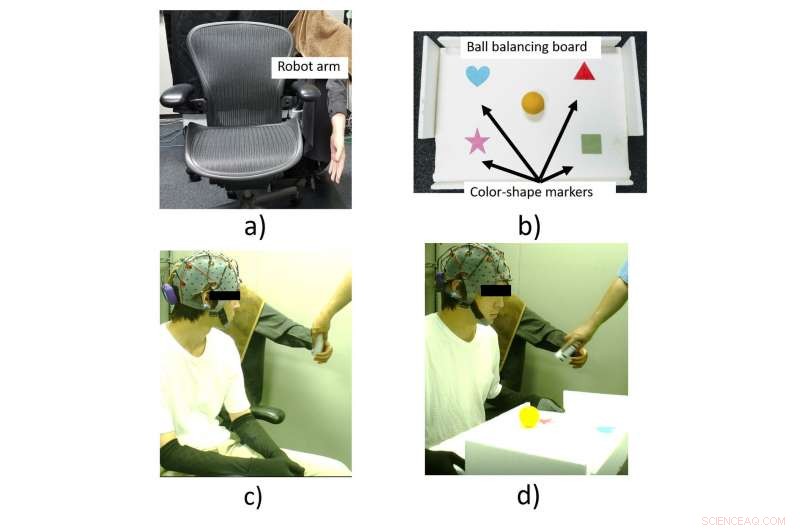
Configuración experimental:(A) Silla con un brazo robótico similar a un humano en su costado. (B) Tabla de equilibrio de bolas que contiene marcadores de forma de color. (C) Participantes que usan el IMC para agarrar o soltar una botella con el brazo robótico. (D) Participantes que realizan la tarea multitarea:agarrar la botella mientras simultáneamente balancean una pelota en una tabla sostenida con sus propias manos. Crédito:Penaloza y Nishio, Sci. Robot . 3, eaat1228 (2018)
Un par de investigadores del Instituto Internacional de Investigación de Telecomunicaciones Avanzadas de Japón ha desarrollado una interfaz cerebro-máquina (BMI) para manipular un brazo robótico mientras las manos del sujeto realizan una actividad diferente. En su artículo publicado en la revista Ciencia Robótica , Christian Penaloza y Shuichi Nishio describen su sistema y qué tan bien funcionó cuando se probó con voluntarios.
Los esfuerzos de investigación anteriores han llevado al desarrollo de sistemas BMI. En tales sistemas, un usuario lleva una gorra con electrodos. Realizan una actividad, como mover una pelota sobre una mesa, y el sistema registra la actividad de las ondas cerebrales que tiene lugar cuando la persona mueve la pelota. Próximo, Se le pide a la persona que simplemente piense en mover la pelota; el sistema monitorea sus ondas cerebrales y las compara con el patrón almacenado previamente registrado mientras mueve la pelota. Cuando detecta el mismo patrón de ondas cerebrales, utiliza un brazo robótico preprogramado para imitar las acciones de la actividad humana. El sistema ha sido programado para instigar y reproducir una actividad humana utilizando pensamientos humanos. Como señalan los investigadores, los esfuerzos anteriores con los sistemas BMI se han centrado solo en instigar una actividad. En este nuevo esfuerzo, Penaloza y Nishio han aumentado la capacidad de un sistema BMI al instigar una acción robótica deseada utilizando solo el pensamiento, mientras que el sujeto se dedica simultáneamente a una segunda actividad. El resultado es un sistema que permite a una persona controlar tres miembros a la vez:dos naturales y uno artificial.
Para probar y demostrar su sistema, los investigadores pidieron a los voluntarios que participaran en el entrenamiento de IMC y luego usaran el sistema para equilibrar una pelota sobre una superficie plana mientras también usaban un brazo robótico para agarrar y mover una botella de refresco vacía.
Los investigadores informan que los voluntarios se dividieron en dos grupos:los que tuvieron bastante éxito en la realización de las tareas solicitadas, y los que no lo eran. Aquellos en el grupo exitoso pudieron evitar que la pelota rodara por la superficie plana mientras le pedían mentalmente al robot que agarrara y moviera la botella el 85 por ciento del tiempo. Aquellos en el grupo menos exitoso solo pudieron realizar la tarea el 52 por ciento del tiempo. No estaba claro por qué algunos tuvieron más éxito, pero los investigadores sugieren que tuvo algo que ver con los voluntarios, no el IMC.
© 2018 Tech Xplore