Al monitorear la actividad cerebral, el sistema puede detectar en tiempo real si una persona nota un error mientras un robot realiza una tarea. Crédito:MIT CSAIL
Conseguir que los robots hagan cosas no es fácil:por lo general, los científicos tienen que programarlos explícitamente o hacer que comprendan cómo se comunican los humanos a través del lenguaje.
Pero, ¿y si pudiéramos controlar los robots de forma más intuitiva? usando solo gestos con las manos y ondas cerebrales?
Un nuevo sistema encabezado por investigadores del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del MIT tiene como objetivo hacer exactamente eso, permitiendo a los usuarios corregir instantáneamente los errores del robot con nada más que señales cerebrales y el movimiento de un dedo.
Partiendo del trabajo anterior del equipo centrado en actividades simples de elección binaria, el nuevo trabajo amplía el alcance a tareas de opción múltiple, abriendo nuevas posibilidades sobre cómo los trabajadores humanos podrían gestionar equipos de robots.
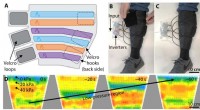
Al monitorear la actividad cerebral, el sistema puede detectar en tiempo real si una persona nota un error mientras un robot realiza una tarea. Usando una interfaz que mide la actividad muscular, la persona puede entonces hacer gestos con las manos para desplazarse y seleccionar la opción correcta para que la ejecute el robot.
El equipo demostró el sistema en una tarea en la que un robot mueve un taladro eléctrico a uno de los tres posibles objetivos en el cuerpo de un avión simulado. En tono rimbombante, demostraron que el sistema funciona en personas que nunca antes se había visto, lo que significa que las organizaciones podrían implementarlo en entornos del mundo real sin necesidad de capacitarlo a los usuarios.
"Este trabajo que combina la retroalimentación de EEG y EMG permite interacciones naturales entre humanos y robots para un conjunto más amplio de aplicaciones de las que podíamos hacer antes de usar solo la retroalimentación de EEG, "dice la directora de CSAIL, Daniela Rus, quien supervisó el trabajo. "Al incluir la retroalimentación muscular, podemos usar gestos para controlar el robot espacialmente, con mucho más matiz y especificidad ".
Doctor. El candidato Joseph DelPreto fue el autor principal de un artículo sobre el proyecto junto con Rus, Andrés F. Salazar-Gomez, ex asociado postdoctoral de CSAIL, la ex científica investigadora de CSAIL Stephanie Gil, investigador académico Ramin M. Hasani, y el profesor de la Universidad de Boston Frank H. Guenther. El documento se presentará en la conferencia Robotics:Science and Systems (RSS) que tendrá lugar en Pittsburgh la próxima semana.
Interacción intuitiva humano-robot
En la mayoría de trabajos anteriores, Por lo general, los sistemas solo podían reconocer las señales cerebrales cuando las personas se entrenaban para "pensar" de formas muy específicas pero arbitrarias y cuando el sistema estaba entrenado en tales señales. Por ejemplo, un operador humano podría tener que mirar diferentes pantallas de luz que corresponden a diferentes tareas del robot durante una sesión de entrenamiento.
No es sorprendente, tales enfoques son difíciles de manejar de manera confiable para las personas, especialmente si trabajan en campos como la construcción o la navegación que ya requieren una intensa concentración.
Mientras tanto, El equipo de Rus aprovechó el poder de las señales cerebrales llamadas "potenciales relacionados con errores" (ErrP), que los investigadores han descubierto que ocurren naturalmente cuando las personas notan errores. Si hay un ErrP, el sistema se detiene para que el usuario pueda corregirlo; que no, continúa.
"Lo bueno de este enfoque es que no es necesario capacitar a los usuarios para que piensen de una manera prescrita, "dice DelPreto." La máquina se adapta a ti, y no al revés ".
Para el proyecto, el equipo utilizó "Baxter", un robot humanoide de Rethink Robotics. Con supervisión humana, el robot pasó de elegir el objetivo correcto el 70 por ciento de las veces a más del 97 por ciento de las veces.
Para crear el sistema, el equipo aprovechó el poder de la electroencefalografía (EEG) para la actividad cerebral y la electromiografía (EMG) para la actividad muscular, colocando una serie de electrodos en el cuero cabelludo y el antebrazo de los usuarios.
Ambas métricas tienen algunas deficiencias individuales:las señales de EEG no siempre son detectables de manera confiable, mientras que las señales de EMG a veces pueden ser difíciles de asignar a movimientos que son más específicos que "moverse hacia la izquierda o hacia la derecha". Fusionando los dos sin embargo, permite una biodetección más robusta y hace posible que el sistema funcione con nuevos usuarios sin formación.
"Al observar las señales tanto musculares como cerebrales, podemos empezar a captar los gestos naturales de una persona junto con sus decisiones rápidas sobre si algo va mal, ", dice DelPreto. Esto ayuda a que la comunicación con un robot se parezca más a comunicarse con otra persona".
El equipo dice que podrían imaginar que el sistema algún día sería útil para las personas mayores, o trabajadores con trastornos del lenguaje o movilidad limitada.
"Nos gustaría alejarnos de un mundo en el que la gente tiene que adaptarse a las limitaciones de las máquinas, ", dice Rus." Enfoques como este muestran que es muy posible desarrollar sistemas robóticos que son una extensión más natural e intuitiva de nosotros ".