Crédito:Universidad de Tecnología de Queensland
Los investigadores de QUT han desarrollado una nueva forma para que los robots vean el mundo desde una perspectiva más humana, que tiene el potencial de mejorar cómo la tecnología, como automóviles sin conductor y robots industriales y móviles, opera e interactúa con la gente.
En lo que se cree que es una primicia mundial, Doctor. estudiante Sourav Garg Dr. Niko Suenderhauf y el profesor Michael Milford de la Facultad de Ciencias e Ingeniería de QUT y del Centro Australiano de Visión Robótica, han utilizado la semántica visual para permitir el reconocimiento de lugares de alto rendimiento desde puntos de vista opuestos.
El señor Garg dijo:mientras que los humanos tenían una capacidad notable para reconocer un lugar cuando volvían a entrar en él desde la dirección opuesta, incluso en circunstancias en las que existan variaciones extremas en su apariencia, la tarea había presentado desafíos para los robots y los vehículos autónomos.
"Por ejemplo, si una persona está conduciendo por una carretera y hace un giro en U y regresa por la misma carretera, en la dirección opuesta, tienen la capacidad de saber dónde están, basado en esa experiencia previa, porque reconocen aspectos clave del medio ambiente. Las personas también pueden hacer eso si viajan por la misma carretera durante la noche, y luego de nuevo durante el día, o durante diferentes temporadas, "Dijo el Sr. Garg.
"Desafortunadamente, no es tan sencillo para los robots. Soluciones de ingeniería actuales, como los que utilizan los coches autónomos, dependen en gran medida de cámaras panorámicas o detección de luz de 360 grados y detección de rango (LIDAR). Si bien esto es efectivo, es muy diferente a cómo navegan los humanos de forma natural.

Crédito:neyro2008 / Alexander Zelnitskiy / 123rf.com / autores
El profesor Michael Milford dijo que el sistema propuesto por el equipo de investigadores de QUT utilizó una red de segmentación semántica de última generación, llamado RefineNet, capacitado en el conjunto de datos de paisajes urbanos, para formar un descriptor de imágenes del tensor semántico local (LoST). Luego, esto se utilizó para realizar el reconocimiento de lugares junto con técnicas de visión robótica adicionales basadas en comprobaciones de verificación de diseño espacial y coincidencia de puntos clave ponderados.
"Queríamos replicar el proceso utilizado por los humanos. La semántica visual funciona no solo mediante la detección, pero comprender dónde se encuentran los objetos clave en el entorno, y esto permite una mayor previsibilidad en las acciones que siguen, "Dijo el profesor Milford.
"Nuestro enfoque nos permite hacer coincidir lugares desde puntos de vista opuestos con poca superposición visual común y entre ciclos de día y noche. Ahora estamos ampliando este trabajo para manejar tanto los puntos de vista opuestos como el cambio de punto de vista lateral, Qué ocurre, por ejemplo, cuando un vehículo cambia de carril. Esto agrega un grado adicional de dificultad ".
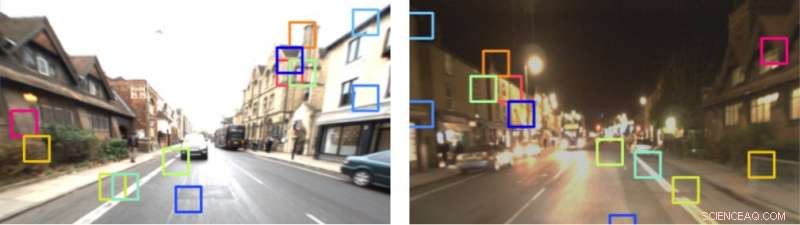
Crédito:1 año, 1000 km:el conjunto de datos Oxford RobotCar
El artículo del equipo de investigación ha sido aceptado para su publicación en Robótica:ciencia y sistemas , la conferencia internacional de robótica más selectiva, que se lleva a cabo en la Universidad Carnegie Mellon en Pittsburgh este mes.