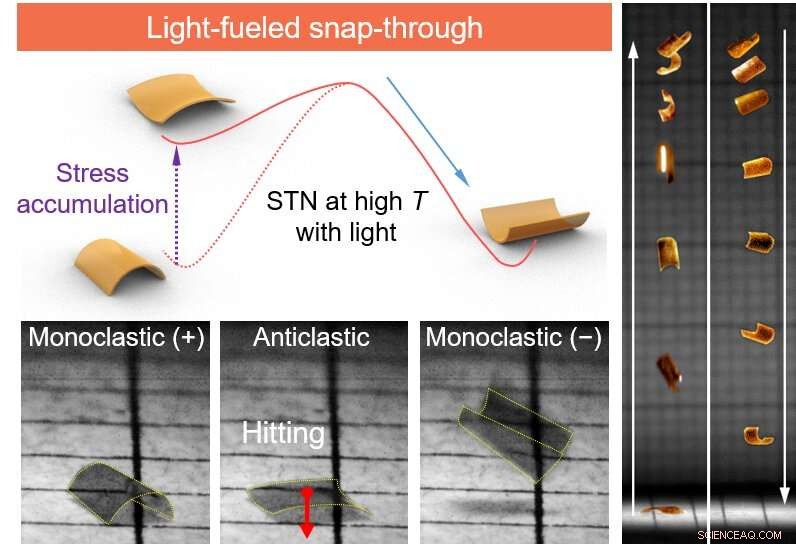
La estructura biestable fotoinducida permite que el polímero cristalino líquido fotoactivo logre un salto inspirado rápido. La acumulación y liberación de energía fotoinducida efectiva es inducida por una geometría nemática súper retorcida de 270 ° de moléculas fotoactivas. Crédito:Universidad Inha
El movimiento de salto se observa comúnmente en la naturaleza, incluso para mamíferos, insectos y otras criaturas terrestres; este movimiento fluido tiene como objetivo una movilidad rápida, un tiempo de llegada más rápido a un destino sobre grandes obstáculos y terreno accidentado. Las propiedades cualitativas del salto, como la dirección y la altura, están reguladas por meras fracciones de energía potencial y cinética. Además, un organismo puede optar por repetir sus movimientos de salto según lo decida por su propia voluntad.
Para implementar un tipo similar de comportamiento de salto en sistemas robóticos, debe haber diseños a medida que generen una transferencia de energía instantánea a un sustrato con suficiente energía acumulada. Muchos de los robots saltadores actuales en el campo se adaptan pateando o empujando los sustratos con las piernas; esto es comúnmente alimentado por actuadores motorizados o sistemas alimentados por batería. Sin embargo, Estos sistemas agregan peso no deseado a los robots saltadores y también son difíciles de fijar en un cuerpo miniaturizado.
Un polímero cristalino líquido fotoactivo es capaz de saltar en movimiento porque la respuesta fotomecánica anisotrópica de la máquina molecular fotoactiva permite que el polímero cristalino líquido acumule y libere energía fotoinducida de forma eficaz. La máquina molecular fotoactiva, un resto azobenceno, está alineado con moléculas de cristal líquido que proporcionan una contracción fotoinducida direccional a partir de la fotoisomerización del azobenceno. La geometría molecular nemática súper retorcida de 270 ° en la parte superior e inferior del polímero cristalino líquido fotoactivo induce un estado biestable no isométrico bajo irradiación de luz actínica con calentamiento simultáneo. Se sabe que la estructura biestable acumula energía por debajo de la barrera energética para deformarse entre dos estructuras estables. Durante el proceso de deformación, la energía acumulada comienza a superar la barrera energética y continúa hasta una liberación instantánea, el llamado 'snap-through'. La liberación instantánea de energía en el polímero cristalino líquido fotoactivo genera el movimiento de salto a través del impacto con el sustrato. Notablemente, la altura máxima de salto alcanza 15,5 longitudes corporales con la velocidad instantánea máxima de 880 BL s -1 .
Un desafío formidable para un robot saltarín es el salto continuo bajo demanda. A diferencia de los robots de salto motorizados, Es difícil implementar saltos continuos o direccionales para un robot que salta con un cuerpo monolítico ya que el ángulo entre el robot y la fuente de actuación cambia continuamente. La irradiación de luz bidireccional permite que el polímero cristalino líquido fotoactivo salte continuamente de dos formas diferentes:saltos fotomecánicos basados en golpes y patadas. Independientemente de la dirección de aterrizaje o la curvatura del robot blando, La irradiación de luz bajo demanda desde la parte superior o inferior proporciona movimientos de salto en robots blandos.
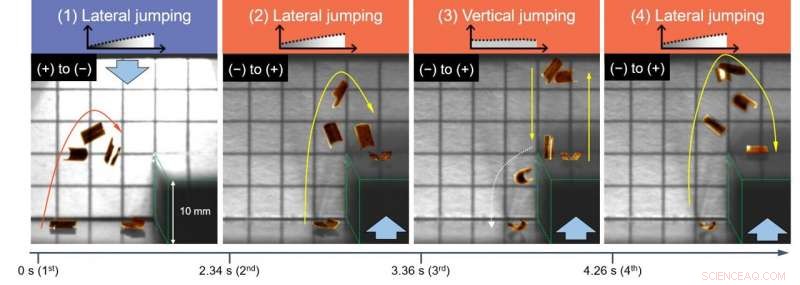
El viaje guiado de un polímero cristalino líquido fotoactivo mediante un patrón de luz (uno desde arriba y otro desde abajo) para llegar al destino en cuestión de segundos. Crédito:Universidad Inha
Adicionalmente, el salto fotomecánico se puede guiar generando un gradiente de intensidad del haz. La intensidad de la luz del gradiente rompe la simetría de la fotoisomerización en un polímero cristalino líquido fotoactivo monolítico que genera la direccionalidad de la energía cinética. Al combinar la irradiación de luz bidireccional con un gradiente de intensidad del haz, el polímero cristalino líquido fotoactivo miniaturizado puede llegar a su destino, incluso superando grandes obstáculos.
Esta estrategia sin precedentes proporcionará información sobre la maniobrabilidad de los saltos sin contacto en robots blandos miniaturizados.