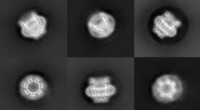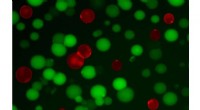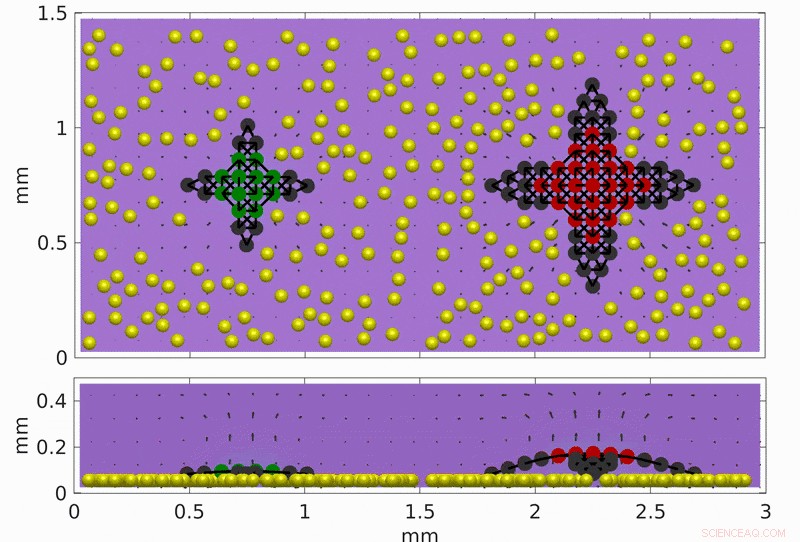
El área de superficie de los sitios activos en el cangrejo rojo es el doble que en el verde; por lo tanto, el cangrejo rojo aleja las partículas de los competidores verdes generando flujos hacia adentro más fuertes (marcados con flechas negras). Crédito:Abhrajit Laskar / Anna Balazs
La colaboración y la competencia son instintos básicos entre las especies biológicas, desde los organismos unicelulares más simples hasta los reptiles, peces y primates, así como a los humanos. Este comportamiento dinámico, resultado de millones de años de evolución, es difícil de replicar en sistemas sintéticos. Sin embargo, Los ingenieros químicos de la Escuela de Ingeniería Swanson de la Universidad de Pittsburgh han recreado estas respuestas en un entorno de partículas microscópicas, hojas, y catalizadores, imitando eficazmente las respuestas de la alimentación, luchando, y huyendo.
Su investigación, "Colaboración y finalización entre láminas activas para partículas autopropulsadas, "se publicó esta semana en procedimientos de la Academia Nacional de Ciencias . La investigadora principal es Anna C. Balazs, la Cátedra John A. Swanson y Profesor Distinguido de Ingeniería Química y del Petróleo en la Escuela Swanson. El autor principal es Abhrajit Laskar, y el coautor es Oleg E. Shklyaev, ambos asociados postdoctorales.
Como preparación para este trabajo, El Dr. Balazs et al utilizaron modelos computacionales para diseñar láminas químicamente activas que pudieran envolver, aleteo y deslizamiento en una microcámara llena de líquido, aprovechando el potencial para crear robots flexibles o "blandos" para entornos fluidos. Para el artículo de PNAS, los investigadores diseñaron sistemas fluídicos que dan forma a las láminas recubiertas de catalizador en una forma que se asemeja a un cangrejo con cuatro "garras, "creando el depredador que puede" cazar "químicamente su presa de partículas.
"A medida que desarrollamos la robótica y los dispositivos inteligentes del futuro, Es importante comprender los límites de imitar funciones biológicas en máquinas creadas por humanos. También es fundamental comprender si los sistemas artificiales pueden colaborar o competir por recursos, "Explicó el Dr. Balazs." Si podemos replicar esta interdependencia, podemos ayudar a sentar las bases para que los robots u otros dispositivos trabajen juntos hacia un objetivo común ".
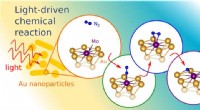
Para afectar este comportamiento, Balazs y sus asociados utilizaron el catalizador en las láminas para convertir los reactivos en productos dentro de una microcámara. Esta reacción crea variaciones en la composición química y la densidad del fluido, que cambian las láminas bidimensionales en "cangrejos" tridimensionales e impulsan tanto a los cangrejos como a las partículas en el fluido. A medida que los cangrejos generan gradientes químicos en un área, las partículas responden intentando "huir" de esta área, formando un sistema altamente interdependiente.
Esta interdependencia también afectó al medio ambiente cuando se agregó un segundo cangrejo al fluido, una vez que se introdujo el reactivo, los dos cangrejos imitaron la cooperación para "compartir" partículas. Sin embargo, si se introdujo un cangrejo más grande, competiría con las formas más pequeñas para capturar todas las partículas por sí mismo.
"En algunos casos, el cangrejo grande no puede atrapar las partículas pequeñas, pero cuando agregamos más cangrejos parecen colaborar como una manada de lobos, "El Dr. Shklyaev explica." Del mismo modo, cuando un depredador aún más grande entra en la microcámara, el "hambre" que genera con una mayor superficie catalítica dominará el comportamiento de las capas de depredadores más pequeñas ".
El Dr. Laskar dice que la simplicidad de este sistema es que la única programación involucrada es la introducción del reactivo químico en el sistema.
"Una vez que agregamos un reactivo en la microcámara, todos los comportamientos biomiméticos ocurrieron espontáneamente, ", dijo." Entonces podemos adaptar la medida en que las partículas responden a los gradientes químicos, porque diferentes partículas responderán de diferentes maneras. Así que cambiar la propiedad de incluso un tipo de objeto altera la interdependencia de todo el sistema ".
Según el Dr. Balazs, los nuevos hallazgos indican la capacidad de controlar la actividad dentro de la microcámara en el espacio y el tiempo, permitiendo así que las hojas respondan a diferentes comandos solo cambiando los reactivos agregados a la solución.
"Nuestros cálculos revelan la capacidad de dirigir objetos microscópicos para que realicen funciones específicas, como transportar células o construir estructuras complejas, ", dijo." Estas reglas de diseño tienen el potencial de diversificar la funcionalidad de los dispositivos de microfluidos, permitiéndoles realizar tareas significativamente más complejas ".