Un equipo de científicos europeos ha publicado el mapa geológico más detallado de Oxia Planum, el lugar de aterrizaje del rover Rosalind Franklin de la ESA en Marte. Esta mirada exhaustiva a la geografía y la historia geológica del área ayudará al rover a explorar el terreno que alguna vez fue rico en agua, en busca de signos de vida pasada y presente.
El mapa ofrece a los científicos una ventaja antes de que Rosalind Franklin aterrice allí en 2030. Tras cuatro años de elaboración, este mapa identifica 15 unidades con características geológicas características que pueden ayudar a decidir cómo el rover explora el área, interpreta su entorno e intenta recopilar evidencia. de la vida primitiva.
Oxia Planum se encuentra cerca del ecuador marciano y contiene depósitos sedimentarios que tienen casi 4 mil millones de años. A escala geológica, este será el lugar de aterrizaje más antiguo visitado por un rover en Marte. La región es rica en minerales arcillosos formados en presencia de agua. Estas rocas son ideales para preservar evidencia de las primeras formas de vida. Esto lo convierte en un lugar excelente para buscar pistas sobre si alguna vez existió vida en el planeta rojo.
Durante los confinamientos por COVID, el equipo científico de Rosalind Franklin inició un programa de capacitación en línea para alrededor de 80 voluntarios para mapear el lugar de aterrizaje elegido.
El trabajo se dividió en 134 áreas de un kilómetro cuadrado, para que el equipo pudiera cubrir completamente la zona de aterrizaje estimada. Los científicos utilizaron un sistema basado en web que permitía a todos trabajar en el mapa en paralelo. El software fue proporcionado por el Jet Propulsion Laboratory de la NASA y configurado en la ESA.
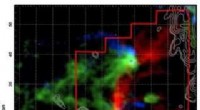
Los datos provienen del sistema de imágenes en color y estéreo de superficie (CaSSIS) a bordo del ExoMars Trace Gas Orbiter y de varios instrumentos en el Mars Reconnaissance Orbiter (MRO) de la NASA, incluida la cámara HiRISE, que devuelve imágenes de la órbita de Marte a 25 cm por píxel. P>
Luego, los encargados del mapeo reunieron la información de todas las áreas para formar un mapa coherente que muestra la geología del lugar de aterrizaje con un detalle sin precedentes. El mapa incluye los principales tipos de lecho rocoso y estructuras con formas distintas, como crestas y cráteres. Incluso presenta el material que reposa encima, por ejemplo, arrastrado por el viento o arrojado a largas distancias cuando los meteoritos impactan en la superficie.
El resultado es el mapa de mayor resolución de Oxia Planum hasta el momento, creado a una escala de 1:25 000, según la cual cada centímetro equivale a 250 metros en la superficie marciana. Un recorrido promedio de 25 a 50 metros por día para Rosalind Franklin sería de uno a dos milímetros en el mapa.
El mapa ha sido publicado en el Journal of Maps , junto con un artículo científico que incluye observaciones e interpretaciones de cada unidad geológica y pronto será seguido por una segunda publicación que explora lo que estas unidades geológicas significan para las ideas de los científicos sobre cómo era el entorno del antiguo Marte.
El ejercicio familiarizó a los científicos de diferentes equipos con la geología y la geografía del lugar de aterrizaje años antes de que el rover comenzara a operar en Marte. El equipo científico de Rosalind Franklin ahora tiene una mejor idea de los posibles objetivos científicos, el tipo de terreno al que se enfrentará el rover y algunos peligros en su camino.
"Este mapa es interesante porque es una guía que nos muestra dónde encontrar las respuestas. Sirve como una hipótesis visual de lo que sabemos actualmente sobre las diferentes rocas en el lugar de aterrizaje. Los instrumentos en Rosalind Franklin nos permitirán probar nuestra conocimiento sobre el terreno cuando llegue el momento", explica Peter Fawdon, uno de los autores principales de la Open University.
El rover Rosalind Franklin de la ESA está equipado para buscar evidencia de vida pasada y presente en Marte gracias a su taladro e instrumentos científicos. Permitirá a los equipos científicos en la Tierra planificar la estrategia para las expediciones diarias de Rosalind Franklin a Marte mientras identifican el mejor lugar para perforar bajo el duro entorno de radiación y los cambios diarios en la temperatura de la superficie.
Rosalind Franklin será el primer rover en perforar dos metros bajo la superficie, adquiriendo muestras donde hay mayores posibilidades de preservación de firmas biológicas que en la superficie y analizándolas con su laboratorio a bordo.
Más información: Peter Fawdon et al, El mapa de alta resolución de Oxia Planum, Marte; el lugar de aterrizaje de la misión del rover ExoMars Rosalind Franklin, Journal of Maps (2024). DOI:10.1080/17445647.2024.2302361
Proporcionado por la Agencia Espacial Europea