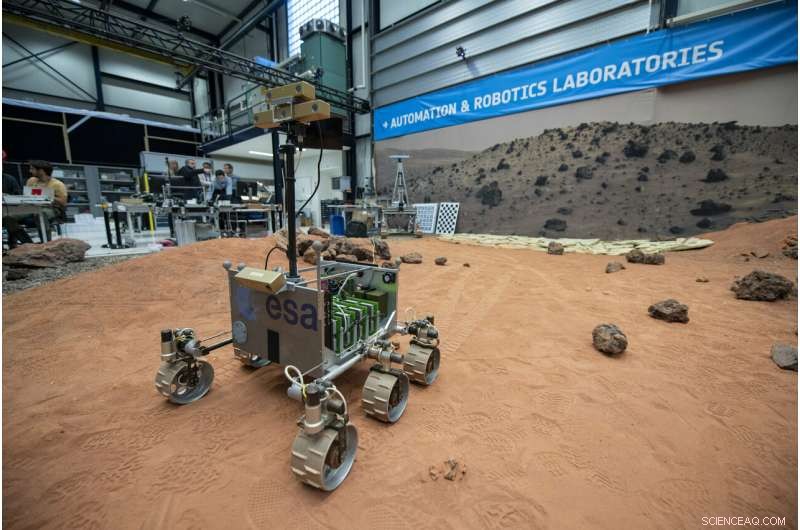
Una versión a media escala del rover ExoMars, llamado ExoMars Testing Rover (ExoTeR), visto maniobrando con cuidado a través de las rocas rojas y la arena del banco de pruebas de utilización planetaria de 9x9 m, parte del Laboratorio de Robótica Planetaria de la ESA en su centro técnico ESTEC en los Países Bajos, como una prueba de software de navegación autónoma destinado a la misión ExoMars 2020 de la ESA al Planeta Rojo. Crédito:ESA – G. Portero, CC BY-SA 3.0 OIG
El software de navegación destinado a la misión ExoMars 2020 al Planeta Rojo ha superado una prueba de conducción basada en rover en el 'Mars Yard' de la ESA.
El rover ExoMars de la ESA viajará a múltiples ubicaciones y perforará hasta dos metros por debajo de la superficie de Marte en busca de pistas sobre vidas pasadas preservadas bajo tierra.
Una versión a media escala del rover ExoMars, llamado ExoMars Testing Rover (ExoTeR), maniobró con cuidado a través de las rocas rojas y la arena del 'Banco de pruebas de utilización planetaria' de 9 x 9 m, apodado el Mars Yard, parte del Laboratorio de Robótica Planetaria de la ESA en ESTEC en los Países Bajos.
Calculando cuidadosamente su ruta hacia adelante, ExoTeR avanzó a una velocidad de 2 m por minuto, aún varias veces más rápido de lo que conducirá el rover ExoMars real. que progresará a 100 m por día marciano.
La prueba del rover de dos días fue realizada por ingenieros robóticos de la ESA, se unió a un equipo de la agencia espacial francesa CNES en Toulouse. Tienen más de dos décadas de experiencia en navegación autónoma para rovers planetarios, culminando con el desarrollo de la suite de software 'AutoNav' que estaba haciendo la conducción.
Durante 2017 ExoTeR pasó a ALTEC en Italia, el sitio del centro de control y monitoreo del rover de ExoMars, para permitir que el equipo de control entrene con el rover avanzado. En diciembre, el rover regresó a ESTEC para una actualización de su algoritmo de navegación autónoma.
La prueba de navegación siguió, confirmando que el software estaba funcionando bien. Próximo ExoTeR volverá a Italia, permitiendo que el equipo de control de ALTEC adquiera experiencia trabajando con la funcionalidad adicional de la navegación autónoma.
La enorme distancia de la Tierra a Marte equivale a un retraso de señal de entre cuatro y 24 minutos, haciendo impracticable el control directo de ExoMars. En cambio, el rover será capaz de tomar algunas de sus propias decisiones.
"En lugar de enviar trayectorias completas sin peligro para que las siga el rover, La navegación autónoma nos permite enviarle solo un punto de destino, "explica el ingeniero de robótica de la ESA Luc Joudrier.
"El rover crea un mapa digital de su vecindad y calcula la mejor manera de llegar a ese punto objetivo. Mirando el mapa, intenta colocar el rover en todas estas ubicaciones adyacentes para determinar si el rover estaría seguro en cada una de estas posiciones. - o si las rocas son demasiado altas o el terreno demasiado empinado.

Una versión a media escala del rover ExoMars, llamado ExoMars Testing Rover (ExoTeR), que se utiliza para probar el software de navegación autónoma desarrollado por el CNES en las rocas rojas y la arena del banco de pruebas de utilización planetaria de 9x9 m, parte del Laboratorio de Robótica Planetaria de la ESA en su centro técnico ESTEC en los Países Bajos. Crédito:ESA – G. Portero, CC BY-SA 3.0 OIG
"Trabajando desde el mapa de navegación local, el móvil calcula la ruta segura hacia la meta y comienza a moverse a lo largo de un segmento de la ruta calculada, al final del segmento repite el mismo proceso de mapeo para progresar.
"Es similar a un caminar humano. Miramos hacia adelante para decidir hacia dónde vamos, pero mientras caminamos miramos hacia abajo y, si es necesario, cambiamos de rumbo para evitar obstáculos. Una vez que hemos elegido un camino sin obstáculos, nos aseguramos de seguir ese camino para permanecer a salvo ".
El rover ExoTeR, como el propio vehículo de ExoMars, está equipado con cámaras de navegación estéreo montadas en el mástil para el mapeo de elevación digital. Y a medida que avanza, comprueba constantemente su progreso utilizando un par de cámaras en su chasis frontal.
Este seguimiento de movimiento basado en la visión funciona mejor que simplemente medir el giro de las ruedas del rover porque permite a los controladores tener en cuenta cualquier deslizamiento de las ruedas:los rovers en Marte han sido previamente atrapados en arena profunda, y el giro continuo de la rueda podría en realidad hundirlos más profundamente.

El rover ExoTeR, como el propio vehículo de ExoMars, está equipado con cámaras de navegación estéreo montadas en el mástil para el mapeo de elevación digital. Crédito:ESA – G. Portero, CC BY-SA 3.0 OIG
El rover ExoTeR, completo con software actualizado, ahora está configurado para volver a ALTEC en Italia, permitiendo que el equipo de control adquiera experiencia con la funcionalidad adicional de la navegación autónoma antes de que se complete el software de vuelo de ExoMars.
El software de vuelo final de ExoMars en realidad llevará dos conjuntos de software de navegación autónoma, con otro desarrollado por Airbus en Stevenage, REINO UNIDO.
"La combinación debería dar al rover una mayor flexibilidad, "dice Luc." La idea es que uno podría tener un mejor desempeño en terrenos más difíciles, mientras que el otro podría moverse más rápido a lo largo de un terreno más fácil ".