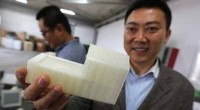
Rover RAT de noche. Crédito:Fernando Gandía / GMV
Un par de rovers de la ESA recorrieron una zona similar a la luna de Tenerife tanto de día como de noche durante una campaña de prueba de nueve días. recopilación de terabytes de datos para análisis de seguimiento.
Un equipo del Laboratorio de Robótica Planetaria de la ESA, con un vehículo llamado Heavy Duty Planetary Rover (HDPR), se unieron a ingenieros de GMV en España que emplearon un segundo rover propiedad de la ESA y sistemas de control asociados llamado Rover Autonomy Testbed (RAT), como parte del proyecto Lunar Scenario Concept Validation and Demonstration (Lucid) de la ESA.
"Hasta ahora, Los rovers planetarios siempre se han operado durante la luz del día local, ", explica el ingeniero de robótica de la ESA, Martin Azkarate." Pero para las misiones propuestas a las regiones polares de la luna, las condiciones de iluminación serán más difíciles.
"Su alta latitud significa que el Sol permanece bajo en el horizonte, proyectando largas sombras, y los cráteres profundos permanecen atascados en una sombra permanente, lo que potencialmente almacena hielo de agua científicamente interesante y otros volátiles congelados.
"Puedes imaginar el estrés de operar un rover de varios millones de euros con un joystick en una oscuridad casi total. Con Lucid, buscamos descubrir las mejores formas de navegar por la superficie lunar con una iluminación y un terreno variados, analizando diferentes sensores y herramientas de software.

Rover HDPR y luna. Crédito:ESA / KP Robotics
"Entonces, los operadores de RAT han estado probando diferentes opciones de sensores de manera incremental. Mientras tanto, usamos el conjunto completo de sensores del HDPR de movimiento más rápido para recopilar datos adicionales para un análisis de seguimiento mejorado, y realizar también algunas actividades de prueba adicionales ".
Los sensores en cuestión incluyen cámaras estéreo con lámparas nocturnas asociadas, cámaras de alcance de 'tiempo de vuelo', sensores lidar de 'radar láser', unidades de medida inercial y sensores de rueda.
Las pruebas se realizaron en el Parque Nacional del Teide con vistas al volcán Teide, en una zona rocosa llamada Las Minas de San José.
"Es difícil encontrar ubicaciones adecuadas como esta, "agrega Martin." En comparación con las áreas volcánicas más rocosas cercanas donde los rovers no podrían atravesar en absoluto, este lugar es maniobrable a la par que similar a la luna, con arena y piedras pequeñas sobre la roca, y lo suficientemente grande como para hacer más de 13 km de travesías ".

Los dos rovers de la ESA vistos durante las pruebas nocturnas en Tenerife durante la campaña de pruebas de junio de 2017. Los vehículos Heavy Duty Planetary Rover y Rover Autonomy Testbed tenían más de 200 vatios de iluminación conectados para navegar de manera segura en la oscuridad. Crédito:Agencia Espacial Europea
Las pruebas comenzaron de día, Asegurarse de que los rovers funcionaran bien y recopilar datos de `` verdad terrestre '' utilizando GPS y un dron sobrevolando para un mapeo detallado, con qué observaciones del rover se podrían comparar. Las operaciones nocturnas siguieron en la segunda mitad de la campaña.
Los equipos también lograron algunos objetivos adicionales, incluida la recopilación de conjuntos de datos que se pueden utilizar para las pruebas posteriores de los algoritmos de navegación en el laboratorio. El HDPR también fue dirigido de forma remota por un equipo de control en el continente europeo.
Además, el último día, el HDPR se utilizó para pruebas de navegación autónoma, para ver si podía dirigirse y conducirse por sí mismo.
"La luna está lo suficientemente cerca para el control remoto directo, aunque con un ligero retraso de tiempo, "explica el ingeniero de robótica Levin Gerdes." Pero para Marte, la distancia involucrada lo hace imposible. En su lugar, los rovers marcianos se cargan periódicamente con conjuntos de telecomandos a seguir.

Rover planetario de servicio pesado de rápido movimiento de la ESA. Crédito:Agencia Espacial Europea
"Sin embargo, este es un proceso lento. Un proceso más rápido El rover de navegación automática se considera una tecnología necesaria para misiones futuras, como los coches autónomos en la Tierra. Pero sin caminos el rover tendrá que trazar su propia ruta, primero tomando imágenes, luego usándolos para mapear el área circundante, seguido de la identificación de obstáculos y la planificación de un camino para alcanzar de manera segura su objetivo asignado.
"Gestionamos varias carreras, el más largo de los cuales fue de más de 100 m - finalmente para que el rover nos informara que su destino asignado era inalcanzable, que resultó ser cierto. Había algunas pendientes que eran demasiado empinadas para garantizar una travesía segura ".
El equipo de GMV tiene previsto regresar a Las Minas de San José este septiembre para realizar más pruebas, mientras que el Laboratorio de Robótica Planetaria de la ESA está empleando sus más de tres terabytes de datos de prueba de campo para ejecuciones de rover virtuales y más investigaciones.