Aquí se muestra una versión inicial de la tecnología de perforación, el Auto-Gopher-1, con el núcleo obtenido al perforar un orificio de 3 m en yeso de 40 MPa. Crédito:NASA
La capacidad de penetrar subsuperficies y recolectar muestras prístinas desde profundidades de decenas de metros a kilómetros es fundamental para la exploración futura de cuerpos en nuestro sistema solar. SMD está apoyando el desarrollo de un muestreador de perforación profunda llamado Auto-Gopher para un posible despliegue en futuras misiones de exploración espacial.
El Auto-Gopher emplea un mecanismo de percusión accionado piezoeléctricamente para romper formaciones y un motor eléctrico para girar la broca y capturar los recortes en polvo. Incorpora una arquitectura alámbrica; el taladro está suspendido en el extremo de una correa de diámetro pequeño que proporciona energía, comunicación, así como el soporte estructural necesario para bajar y levantar el taladro fuera del pozo. Gracias a esta arquitectura única, la profundidad máxima de perforación está limitada solo por la longitud de la correa. La operación con cable utilizada en el Auto-Gopher elimina uno de los principales inconvenientes de los sistemas tradicionales de sartas de perforación continuas:la necesidad de múltiples secciones de perforación que pueden aumentar significativamente la masa y la complejidad de una perforación profunda. Como tal, la masa y el volumen del sistema Auto-Gopher se pueden mantener bastante bajos para agujeros poco profundos o profundos. Mientras perfora, Numerosos sensores e instrumentos integrados pueden realizar análisis in situ de la pared del pozo. Al alcanzar una profundidad preestablecida, el taladro se retira del pozo, el núcleo y / o los recortes se eliminan para un análisis detallado mediante instrumentos a bordo, y el taladro se vuelve a bajar al agujero para continuar el proceso de penetración.
El Auto-Gopher está destinado a ayudar a los científicos a responder una de las preguntas más urgentes de la ciencia:¿Ha existido vida en algún otro lugar del universo? Dado que el agua es un requisito previo fundamental para la vida, según lo que sabemos, Las misiones de exploración de la NASA tienen como objetivo cuerpos en el sistema solar que se sabe que tienen o han tenido agua líquida. El último estudio planetario decenal (Visión y viajes para la ciencia planetaria en la década 2013-2022) recomendó que la NASA explore tres cuerpos del sistema solar con regiones acuosas accesibles:Marte; La luna de Júpiter Europa; y la luna de Saturno, Encelado. Cada uno de estos cuerpos plantea diferentes desafíos relacionados con la perforación. La perforación en Marte requiere la penetración de roca seca y regolito que tienen propiedades físicas (es decir, Fuerza de Tensión, dureza, etc.) que pueden variar en muchos órdenes de magnitud a través de la profundidad de perforación. Un taladro en Encelado y Europa deberá operar en hielo a temperaturas por debajo de 100 K, teniendo en cuenta la baja gravedad en Encelado o la alta radiación superficial en Europa. El Auto-Gopher debe diseñarse para lograr sus objetivos de penetrar el subsuelo a grandes profundidades, capturando muestras prístinas, y entregar esas muestras a instrumentos a bordo para su análisis o para su posible devolución de muestras, todo ello en las duras condiciones que se encuentran en el espacio. Ilustración del concepto Auto-Gopher como taladro profundo con cable.
El objetivo del esfuerzo de desarrollo de Auto-Gopher es demostrar una tecnología escalable que hace posible la perforación profunda utilizando los vehículos de lanzamiento y las fuentes de energía actuales. Este desarrollo de tecnología se ha logrado en varias generaciones, incluido el Ultrasonic / Sonic Driller / Corer, Gopher ultrasónico / sónico, y el Auto-Gopher-1. En 2015, PSD adjudicó un proyecto en el marco de su programa MatISSE para respaldar la próxima generación de desarrollo de tecnología Auto-Gopher:el Auto-Gopher-2. En 2015, el proyecto produjo un mecanismo de ruptura y retención de núcleos y demostró su funcionamiento. Este último taladro también está diseñado para albergar dispositivos electrónicos, sensores, y mecanismos necesarios para la perforación autónoma, y los subsistemas críticos actualmente se están probando y probando. Las actividades planificadas para el futuro incluyen pruebas de campo para validar la operación de perforación en condiciones difíciles en una cantera de yeso de EE. UU. (El yeso puede cambiar de yeso cristalino duro, al yeso azucarado blando, a anhidrita muy dura con numerosas venas de arcilla) y dentro de una cámara de vacío, perforación en hielo a aproximadamente -100 ° C.
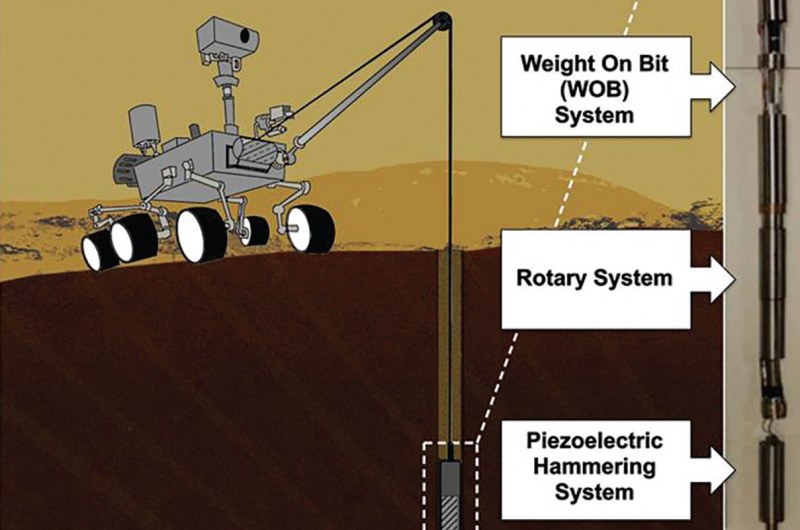
Ilustración del concepto Auto-Gopher como taladro profundo con cable. Crédito:NASA