MARTY, el DeLorean autónomo a la deriva. Crédito:Jonathan Goh
Cuando el DeLorean se detuvo y la nube de humo de los neumáticos se disipó, Jon Goh se asomó por la ventana del lado del pasajero para ver a decenas de espectadores reunidos vitoreando y chocando los cinco con la prueba exitosa.
La multitud, y anticipación, había construido durante toda la tarde, mientras Goh, un reciente doctorado en ingeniería mecánica. graduado de Stanford, había estado delineando una carrera de obstáculos de un kilómetro de largo en conos de tráfico en Thunderhill Raceway en el norte de California. El sol se estaba poniendo rápido pero Goh y su copiloto, otro estudiante de posgrado llamado Tushar Goel, No podía esperar hasta la mañana para probar el circuito sinuoso. Además, MARTY, el conductor, no necesitaba ver la pista, solo necesitaba las coordenadas GPS y los algoritmos de la computadora portátil de Goh para trazar su ruta.
MARTY es un DeLorean de 1981 que Goh y sus colegas del Laboratorio de Diseño Dinámico de Stanford convirtieron en un modelo totalmente eléctrico. coche de deriva autónomo. Hace cuatro años, MARTY se desvió, el estilo de conducción en el que el automóvil avanza a pesar de que apunta hacia los lados, a través de sus primeras rosquillas con una precisión inhumana. Desde entonces, Goh y su equipo han estado ocupados soldando y codificando para preparar a MARTY para aplicar esas habilidades básicas de deriva en un curso de conducción intenso. e increíblemente todo había funcionado a la perfección. MARTY se abrió paso chirriando a través de giros y rápidos zigs y zags en solo unos minutos, levantando humo y trozos de goma, sin mellar un solo cono a lo largo del recorrido.
Mientras continuaban los vítores, la satisfacción se apoderó de Goh. Completar el curso "MARTYkhana" en el primer intento fue increíble, pero sabía que los datos únicos obtenidos de la carrera podrían transformar las capacidades de los sistemas de conducción autónoma que se encuentran en los automóviles de hoy.
Ir más allá de los límites para tomar el control
MARTYkhana, un riff del formato de carreras de autocross "gymkhana" considerado como la prueba maestra de la habilidad de un piloto, no es un truco. Realización de investigaciones en alta velocidad, condiciones de conducción complicadas como esta es un enfoque básico del Dynamic Design Lab, donde el ingeniero mecánico Chris Gerdes y sus estudiantes conducen automóviles autónomos a situaciones de conducción desafiantes que solo los mejores conductores humanos pueden manejar de manera confiable. Las computadoras a bordo miden la respuesta del automóvil en docenas de carreras, y los ingenieros traducen la dinámica del vehículo en un software que algún día podría ayudar a su automóvil a esquivar rápidamente a un peatón que se lanza a la carretera.
La mayoría de los vehículos automatizados en la carretera han sido diseñados para manejar casos más simples de conducción, como permanecer en un carril o mantener la distancia correcta de otros automóviles.
"Estamos tratando de desarrollar vehículos automatizados que puedan manejar maniobras de emergencia o superficies resbaladizas como hielo o nieve, ", Dijo Gerdes." Nos gustaría desarrollar vehículos automatizados que puedan usar toda la fricción entre la llanta y la carretera para sacar el auto de peligro. Queremos que el automóvil pueda evitar cualquier accidente que se pueda evitar dentro de las leyes de la física ".
Entrenar a un automóvil autónomo para que se desplace es un método sorprendentemente bueno para probar la capacidad de un automóvil para conducir de manera evasiva. En condiciones típicas, un conductor señala el automóvil hacia donde quiere ir y usa los pedales del acelerador y del freno para controlar la velocidad. Al derrapar ya sea intencionalmente o no, esto sale por la ventana.
"De repente, el automóvil apunta en una dirección muy diferente a donde se dirige. El volante controla la velocidad, el acelerador afecta la rotación, y los frenos pueden afectar la rapidez con que cambia de dirección, "Dijo Goh." Tienes que entender cómo usar estas entradas familiares de una manera muy diferente para controlar el coche, y la mayoría de los conductores simplemente no son muy buenos manejando el automóvil cuando se vuelve tan inestable ".

Marcos superpuestos, a intervalos de 0,5 segundos, de un video aéreo de un éxito, experimento de deriva totalmente autónomo de “Figura 8” en MARTY. Este experimento se realiza a velocidades de 50 km / h, y transiciones a través de +/- 40 grados de deslizamiento lateral en aproximadamente un segundo. Crédito:Jonathan Goh
Los vehículos comerciales están equipados con sistemas de control electrónico de estabilidad que intentan evitar que los automóviles entren en estos estados inestables. pero aquí es donde prosperan los vagabundos. Aprovechan esta inestabilidad para maniobrar el automóvil de maneras más ágiles y precisas que les permiten atravesar una pista de obstáculos estrecha sin siquiera rozar las barreras.
Al estudiar los hábitos de los conductores profesionales y probar esas mismas maniobras de control en MARTY, el equipo de Stanford ha permitido que el automóvil utilice un rango mayor de sus límites físicos para mantener la estabilidad en un rango más amplio de condiciones, y las matemáticas involucradas podrían permitir a los sistemas autónomos maniobrar con la agilidad de un corredor a la deriva en emergencias.
"A través de la deriva, podemos llegar a ejemplos extremos de física de conducción que de otra manera no obtendríamos, "Dijo Goh." Si podemos conquistar cómo controlar de forma segura el coche en los escenarios más estables e inestables, resulta más fácil conectar todos los puntos intermedios ".
Una transformación desde cero
Cuando Gerdes y Goh se propusieron construir MARTY, que significa banco de pruebas de investigación de actuadores múltiples para control de guiñada, sabían que querían un automóvil con tracción trasera que les permitiera la libertad de realizar actualizaciones sin fin, y querían que tuviera un cierto factor interesante.
"La forma en que lo vemos, si va a construir un vehículo de investigación, ¿Por qué no hacerlo con algo de estilo? ”, le gusta decir a Gerdes. asintiendo con la cabeza a la línea clásica de Regreso al futuro.
Un DeLorean cumplía todos esos requisitos. Si tuvieras que mirar debajo de la icónica carcasa de acero inoxidable de MARTY, encontraría muy poco DeLorean en este punto. La transmisión de poca potencia ha sido reemplazada por baterías robustas y motores eléctricos desarrollados por Renovo. La suspensión original era demasiado blanda para aguantar una deriva decente, por lo que el equipo diseñó y fabricó componentes que podían soportar la tarea. Controles mecánicos para la dirección, el frenado y el estrangulamiento fueron reemplazados por sistemas electrónicos. Hay una jaula antivuelco.
Un par de antenas GPS salpican el techo y rastrean la ubicación del automóvil a una pulgada, y toda la operación se ejecuta en computadoras escondidas detrás de los asientos. Entrar en el diseño del curso, MARTY calcula la ruta de deriva más suave posible en cuestión de segundos. Se tarda mucho más en instalar los conos de tráfico.
Conduce como un ser humano
El primer artículo de revista relacionado con MARTY se publicó recientemente y define el sistema que utiliza el automóvil para controlar su ángulo y posición con precisión en condiciones básicas de deriva. El diseño del controlador fue mucho más sencillo de lo esperado, Goh dijo, y es de acceso abierto para permitir que otros repitan el enfoque.
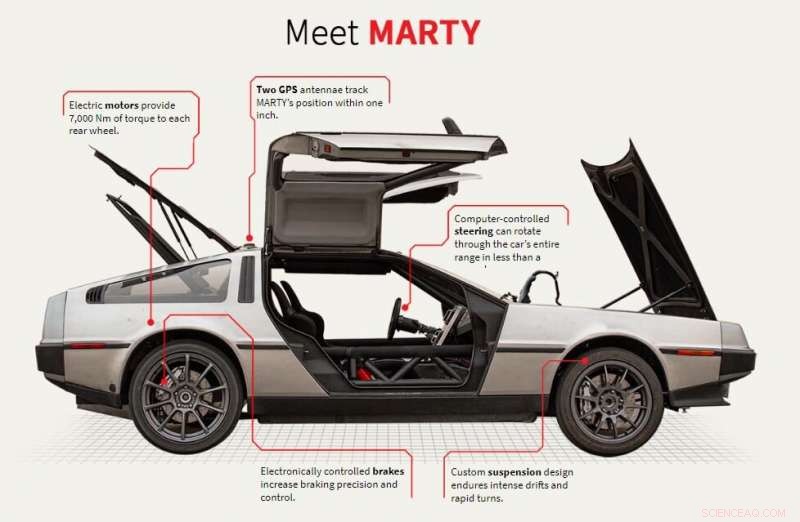
Crédito:Infografía de Yvonne Tang; foto original de Jonathan Goh
Otros artículos en proceso detallarán las técnicas que desarrolló el equipo que utilizan el rango de dirección completo del automóvil, que es lo que le permite completar rutas más complicadas, como MARTYkhana. Y el equipo continúa experimentando cómo la incorporación de frenos delanteros y traseros puede abrir aún más capacidades para el sistema autónomo. En total, Este trabajo permite a MARTY hacer giros sucesivos más bruscos aún más rápidamente, lo que ayudará a entrenarlo aún más para navegar en condiciones extremas.
"Los resultados hasta ahora son bastante excepcionales, ", Dijo Gerdes." Los sistemas de control de estabilidad de los automóviles modernos limitan el control del conductor a un rango muy estrecho del potencial del automóvil. Con MARTY hemos podido definir de forma más amplia la gama de condiciones en las que podemos operar de forma segura, y tenemos la capacidad de estabilizar el coche en estas condiciones inestables ".
La deriva es tanto una forma de arte como una habilidad técnica, un detalle que Gerdes ha destacado desde el principio. Es por eso que se entusiasmará con lo impresionado que está de que sus estudiantes hayan programado a MARTY para que se desplace a la par con los conductores profesionales.
"Es realmente impresionante lo ágil que el automóvil puede hacer esas transiciones y también lo preciso que podría ser, "dijo Fredric Aasbo, Campeón del Mundo de Fórmula Drift 2015. "Porque ese es el truco como piloto. Eso es lo que todos estamos tratando de averiguar".