Los drones exploran el medio ambiente volando en diferentes direcciones. Cuando un dron detecta otro dron en su dirección preferida, intentará volar en una dirección diferente. Cuando esto no sea posible (como en esta imagen), los drones de menor prioridad se apartarán del camino de los drones de mayor prioridad. Los drones se enfrentan a los obstáculos sobre la marcha, y al hacerlo entrar y salir de diferentes habitaciones. Crédito:TU Delft / MAVLab
Los investigadores han presentado un enjambre de diminutos drones que pueden explorar entornos desconocidos completamente por sí mismos. Este trabajo, presentado en Ciencia Robótica el 23 de octubre, es un paso significativo en el campo de la robótica de enjambres. El desafío proviene del hecho de que los diminutos drones de 33 gramos necesitan navegar de forma autónoma mientras tienen capacidades de detección y computacionales extremadamente limitadas. El equipo de investigación conjunto, con investigadores de TU Delft, University of Liverpool y Radboud University of Nijmegen:abordaron este desafío inspirándose en la relativa simplicidad de la navegación de los insectos.
Inspiración de la naturaleza
Los enjambres de insectos han inspirado a los roboticistas a pensar que los pequeños robots también pueden superar sus limitaciones individuales al operar en un enjambre. Enjambres de robots pequeños y baratos podrían realizar tareas que actualmente están fuera del alcance de los grandes, robots individuales. Por ejemplo, un enjambre de pequeños drones voladores podría explorar un lugar de desastre mucho más rápido que un solo dron más grande. Tales enjambres aún no se han materializado.
Búsqueda y rescate
Durante los últimos cuatro años, un equipo de investigación conjunto de las universidades de TU Delft, Universidad de Liverpool, y la Universidad Radboud de Nijmegen, financiado por el programa de inteligencia artificial natural NWO de la fundación científica nacional holandesa, se ha esforzado por diseñar un enjambre de diminutos drones capaces de explorar entornos desconocidos. El objetivo del proyecto de investigación era dar pasos hacia el uso de enjambres de drones en escenarios de búsqueda y rescate.
La idea principal era que en el futuro, Los rescatistas podrán liberar un enjambre de diminutos drones para explorar un lugar de desastre, como un edificio que está a punto de derrumbarse. El enjambre de drones entrará en el edificio, explorarlo, y regrese a la estación base con la información relevante. Los rescatistas pueden entonces enfocar sus esfuerzos en las áreas más relevantes, por ejemplo, donde todavía hay gente adentro.

El diminuto dron cabe en la palma de una mano y pesa 33 gramos. Junto con los otros drones en un enjambre, es capaz de explorar rápidamente un entorno no tripulado. Crédito:TU Delft / MAVLab
Encontrar víctimas
En el proyecto, se equiparon pequeños drones con cámaras y se enviaron a un entorno de oficina interior para encontrar dos maniquíes que representaran a las víctimas en un escenario de desastre. Esta tarea de búsqueda y rescate de prueba de concepto mostró claramente la ventaja de tener un enjambre. En seis minutos, un enjambre de seis drones pudo explorar alrededor del 80 por ciento de las habitaciones abiertas, lo que sería imposible para uno de los drones solo. Es más, el enjambre también resultó útil para la redundancia. Un dron encontró una víctima pero debido a una falla de hardware de la cámara, no pudo recuperar ninguna imagen. Afortunadamente, otro dron capturó a la víctima en cámara, así como.
Desafío
"El mayor desafío para lograr la exploración de enjambres radica en el nivel de la inteligencia individual de los drones, "dice Kimberly McGuire, el Ph.D. estudiante que ha realizado el proyecto. "Al comienzo del proyecto, nos enfocamos en lograr capacidades de vuelo básicas como controlar la velocidad y evitar obstáculos. Después, diseñamos un método para que los pequeños drones se detecten y se eviten entre sí. Resolvimos esto haciendo que cada dron llevara un chip de comunicación inalámbrica y luego haciendo uso de la intensidad de la señal entre estos chips; esto es como la cantidad de barras que se muestran en su teléfono que disminuyen cuando se aleja de su enrutador WiFi en su hogar. Las principales ventajas de este método son que no requiere hardware adicional en el dron y que requiere muy pocos cálculos ".
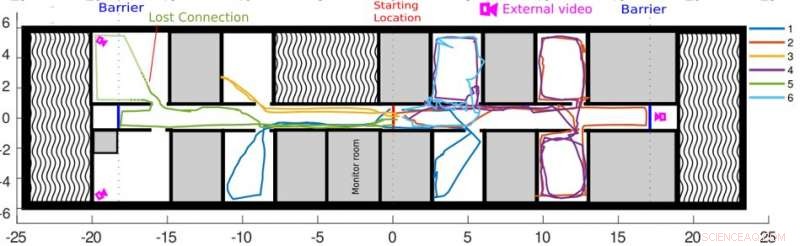
Trayectorias de 6 diminutos drones que exploran todo el piso de una oficina en menos de 6 minutos. Los drones primero vuelan lejos de la estación base en la ubicación de inicio en el medio, explorar las habitaciones abiertas, y finalmente regresar a la estación base Crédito:TU Delft / MAVLab
Navegación autónoma
El desafío más abrumador en el camino de la exploración de enjambres, es la dificultad de hacer que pequeños robots naveguen por sí mismos en un entorno desconocido. La razón de esto es que los pequeños robots son muy limitados en términos de detección y computación.
De nuevo, la naturaleza proporcionó una inspiración importante. Los insectos no hacen mapas muy detallados. En lugar de, conservan puntos de referencia y lugares relevantes para el comportamiento, como las fuentes de alimento y su nido. "La idea principal que subyace al nuevo método de navegación es reducir nuestras expectativas de navegación al extremo:solo requerimos que los robots puedan navegar de regreso a la estación base, "dice Guido de Croon, investigador principal del proyecto. "El enjambre de robots se propaga primero al entorno haciendo que cada robot siga una dirección preferida diferente. Después de explorar, los robots regresan a una baliza inalámbrica ubicada en la estación base ".
Algoritmo de error
"El método de navegación propuesto es un nuevo tipo de algoritmo de error, ", añade Kimberly McGuire." Los algoritmos de errores no hacen mapas del entorno, sino que tratan los obstáculos sobre la marcha. En principio, los mapas detallados son muy convenientes, porque permiten que un robot navegue desde cualquier punto del mapa a cualquier otro punto, a lo largo de un camino óptimo. Sin embargo, los costos de hacer un mapa de este tipo en pequeños robots son prohibitivos. El algoritmo de error propuesto conduce a rutas menos eficientes, pero tiene el mérito de que incluso se puede implementar en pequeños robots ".