Crédito:Bhattacharya et al.
Investigadores del centro Robert Bosch para sistemas físicos cibernéticos en Bangalore, India, Recientemente propusieron un marco de simulación para estudiar sistemáticamente los efectos de la actuación de la articulación espinal en el rendimiento de locomoción de robots cuadrúpedos. En su estudio, descrito en un artículo publicado previamente en arXiv, utilizaron este marco para investigar los comportamientos de la columna vertebral de un robot cuadrúpedo llamado Stoch 2 y sus efectos sobre su rendimiento de salto.
"Esta investigación surgió mientras exploraba la base de la locomoción rápida en animales cuadrúpedos y robots, Shounak Bhattacharya, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Se sabe desde hace algún tiempo que los animales cuadrúpedos pequeños y medianos utilizan la flexibilidad de su columna vertebral para mejorar su velocidad de locomoción y eficiencia energética. Este uso de la flexibilidad inspiró a los roboticistas a explorar el concepto con más detalle para encontrar una solución. a este problema utilizando las herramientas matemáticas disponibles ".
Al contrario de los investigadores anteriores, Bhattacharya y sus colegas se propusieron investigar los comportamientos de la columna vertebral de robots cuadrúpedos utilizando técnicas de aprendizaje automático. El objetivo clave de su estudio fue utilizar el aprendizaje por refuerzo profundo (D-RL) para darse cuenta de la compleja coordinación entre la columna y las piernas en los robots.
"En un marco D-RL, aprender desde cero puede conducir a políticas mejores y más sólidas que la incorporación de la orientación humana, "Bhattacharya dijo". Sin embargo, aprender desde cero implica múltiples fallas iniciales antes de la generación de una política de trabajo. En este trabajo, se necesitaron más de 2 millones de pasos antes de obtener una política activa y utilizable ".
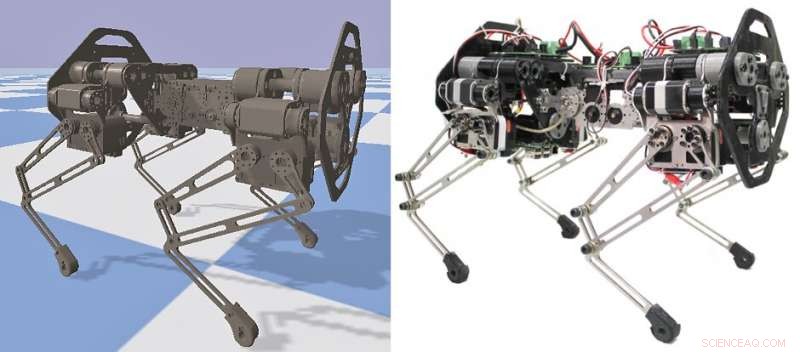
Realizar muchas pruebas directamente en el hardware de un robot requiere una gran cantidad de tiempo y recursos. Por tanto, los investigadores decidieron simular el robot y su entorno en PyBullet, un módulo de Python que mejora el motor de física Bullet con capacidades de robótica y aprendizaje automático. En su estudio, utilizaron PyBullet para evaluar los efectos de la actuación de la articulación espinal en el rendimiento límite de Stoch 2, un robot de espinas cuadrúpedos 16-DOF.
"Entrenamos el modelo de robot en este entorno y observamos que el algoritmo de aprendizaje ejecutaba un entrenamiento completo en 4 horas, cuando se ejecuta durante un máximo de 10 millones de pasos, en una PC con Intel Core i7 a 3.5Ghz con 12 núcleos, y 32 GB de RAM, "Dijo Bhattacharya." El uso de un marco de simulación redujo el tiempo por entrenamiento y eliminó la necesidad de experimentar con el hardware ".
Usando PyBullet como marco de aprendizaje para su robot, los investigadores obtuvieron resultados muy prometedores. Los hallazgos que recopilaron durante las simulaciones sugieren que el uso activo de la columna vertebral sí lo hace, De hecho, mejorar la longitud de la zancada de un robot y el costo de transporte, al mismo tiempo que reduce la frecuencia natural a valores más realistas. Por último, Stoch 2 alcanzó una velocidad límite de 2,1 m / s, con un número máximo de Froude de 2.
Este estudio, supervisado por cuatro miembros de la facultad del Instituto Indio de Ciencias:Shishir Kolathaya, Ashitava Ghosal, Bharadwaj Amrutur y Shalabh Bhatnagar, es parte de un proyecto más amplio llamado Walking Robot. En el futuro, podría inspirar a otros investigadores a utilizar el mismo marco de simulación para mejorar los comportamientos de la columna vertebral de sus robots y el consiguiente rendimiento de locomoción.
"Obtuvimos la coordinación de la columna y la pierna a través de un marco basado en D-RL, que aumentó la eficiencia energética y la velocidad del cuadrúpedo, ", Dijo Bhattacharya." Debe tenerse en cuenta que todos estos comportamientos se obtuvieron desde cero sin ningún conocimiento de la mecánica de la columna vertebral. En nuestro trabajo futuro, planeamos implementar la red neuronal en el hardware y ejecutar la política aprendida directamente ".
© 2019 Science X Network