Un equipo de investigación coreano creó un robot de mano portátil que puede ayudar a los discapacitados que perdieron la movilidad de las manos. El robot puede detectar la intención del usuario recopilando los comportamientos con el algoritmo de aprendizaje automático. Crédito:Soft Robotics Research Center, Universidad Nacional de Seúl
Un equipo de investigación coreano propuso un nuevo paradigma para un robot de mano portátil que puede ayudar a las personas con pérdida de movilidad de las manos. El robot de mano recopila los comportamientos del usuario con un algoritmo de aprendizaje automático para determinar la intención del usuario.
El profesor Sungho Jo (KAIST) y Kyu-Jin Cho (Universidad Nacional de Seúl) han propuesto un nuevo paradigma de detección de intención para los robots de mano portátiles. El paradigma propuesto predice las intenciones de captación / liberación basadas en los comportamientos del usuario, permitiendo a los pacientes con lesión de la médula espinal (LME) con pérdida de movilidad de la mano recoger y colocar objetos.
Desarrollaron el método basado en un algoritmo de aprendizaje automático que predice las intenciones del usuario a través de una cámara de vista en primera persona. Su desarrollo se basa en la hipótesis de que las intenciones del usuario se pueden inferir a través de la colección de comportamientos del brazo del usuario y las interacciones mano-objeto.
El modelo de aprendizaje automático utilizado en este estudio, Red de detección de intención basada en la visión desde una vista EgOcéntrica (VIDEO-Net), está diseñado en base a esta hipótesis. VIDEO-Net se compone de subredes espaciales y temporales, que reconocen los comportamientos del brazo del usuario, y una subred espacial que reconoce las interacciones mano-objeto.
Un paciente con LME que usa Exo-Glove Poly II, un robot de mano suave y portátil, recogió y colocó con éxito varios objetos y realizó actividades esenciales de la vida diaria, como tomar café, sin ninguna ayuda adicional.
Este desarrollo es ventajoso porque detecta las intenciones del usuario sin requerir calibraciones de persona a persona o acciones adicionales. Esto permite que un humano use el robot de mano portátil sin problemas.
Entrevista con el profesor Kyu-Jin Cho
P:¿Cómo funciona este sistema?
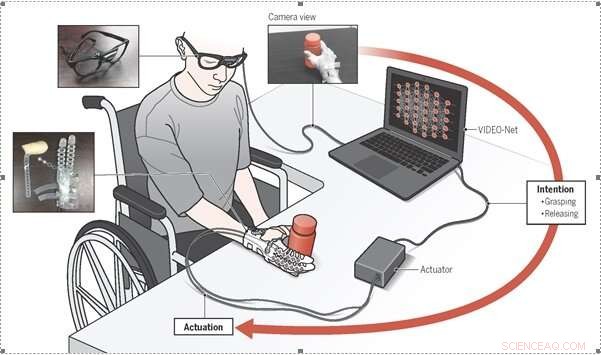
R:Esta tecnología tiene como objetivo predecir las intenciones del usuario, específicamente agarrar y liberar la intención hacia un objeto objetivo, utilizando una cámara de visión en primera persona montada en anteojos. VIDEONet, un algoritmo basado en aprendizaje profundo, está diseñado para predecir las intenciones del usuario desde la cámara en función de los comportamientos del brazo del usuario y las interacciones entre la mano y el objeto. En lugar de usar bio-señales, que se utiliza a menudo para la detección de intenciones de personas discapacitadas, usamos una cámara simple para averiguar si la persona está tratando de agarrar o no. Esto funciona porque los usuarios de destino pueden mover el brazo, pero no sus manos. Podemos predecir la intención de agarre del usuario observando el movimiento del brazo y la distancia desde el objeto y la mano, e interpretar la observación mediante el aprendizaje automático.
P:¿Quién se beneficia de esta tecnología?
R:Como se mencionó anteriormente, esta tecnología detecta las intenciones del usuario a partir de los comportamientos del brazo humano y las interacciones entre la mano y el objeto. Esta tecnología puede ser utilizada por cualquier persona con pérdida de movilidad de la mano debido a una lesión en la médula espinal. carrera, parálisis cerebral o cualquier otra condición, siempre que puedan mover el brazo voluntariamente.
P:¿Cuáles son las limitaciones y trabajos futuros?
R:La mayoría de las limitaciones provienen de los inconvenientes de usar una cámara monocular. Por ejemplo, si un objeto de destino está ocluido por otro objeto, el rendimiento de esta tecnología disminuye. También, si el gesto de la mano del usuario no se puede ver en la escena de la cámara, la tecnología no es utilizable. Para superar la falta de generalidad debido a estos problemas, el algoritmo debe mejorarse incorporando otra información de sensor u otros métodos de detección de intención existentes, como el uso de un sensor de electromiografía o el seguimiento de la mirada.
P:Para utilizar esta tecnología en la vida diaria, ¿que necesitas?
R:Para que esta tecnología se utilice en la vida diaria, un usuario necesita un robot de mano portátil con un módulo de actuación, un dispositivo informático, y gafas con cámara montada. Nuestro objetivo es reducir el tamaño y el peso del dispositivo informático para que el robot pueda ser portátil para su uso en la vida diaria. Usamos un dispositivo informático compacto que cumple con nuestros requisitos, pero esperamos que los chips neuromórficos que pueden realizar cálculos de aprendizaje profundo estén disponibles comercialmente.