Un pequeño robot Clearpath Husky no tripulado, que fue utilizado por los investigadores de ARL para desarrollar una nueva técnica para enseñar rápidamente a los robots comportamientos transversales novedosos con una supervisión humana mínima. Crédito:Ejército de EE. UU.
Investigadores del Laboratorio de Investigación del Ejército de EE. UU. Y el Instituto de Robótica de la Universidad Carnegie Mellon desarrollaron una nueva técnica para enseñar rápidamente a los robots comportamientos transversales novedosos con una supervisión humana mínima.
La técnica permite que las plataformas de robots móviles naveguen de forma autónoma en entornos mientras realizan acciones que un ser humano esperaría del robot en una situación determinada.
Los experimentos del estudio se publicaron y presentaron recientemente en la Conferencia Internacional de Robótica y Automatización del Instituto de Ingenieros Eléctricos y Electrónicos celebrada en Brisbane. Australia.
Los investigadores de ARL, los Dres. Maggie Wigness y John Rogers participaron en debates cara a cara con cientos de asistentes a la conferencia durante su presentación interactiva de dos horas y media.
Según Wigness, Uno de los objetivos del equipo de investigación en la investigación de sistemas autónomos es proporcionar al Soldier compañeros de equipo robóticos autónomos fiables.
"Si un robot actúa como compañero de equipo, las tareas se pueden realizar más rápido y se puede obtener una mayor conciencia de la situación, "Dijo Wigness". Los compañeros de equipo robot se pueden utilizar como investigador inicial para escenarios potencialmente peligrosos, manteniendo así a los soldados más alejados del daño ".
Lograr esto, Wigness dijo que el robot debe poder usar su inteligencia aprendida para percibir, razonar y tomar decisiones.
"Esta investigación se centra en cómo se puede aprender la inteligencia de los robots a partir de algunas demostraciones de ejemplos humanos, ", Dijo Wigness." El proceso de aprendizaje es rápido y requiere una demostración humana mínima, lo que la convierte en una técnica de aprendizaje ideal para el aprendizaje sobre la marcha en el campo cuando cambian los requisitos de la misión ".
Los investigadores de ARL y CMU centraron su investigación inicial en el aprendizaje de los comportamientos transversales del robot con respecto a la percepción visual del robot del terreno y los objetos en el entorno.
Más específicamente, al robot se le enseñó a navegar desde varios puntos del entorno mientras permanecía cerca del borde de una carretera, y también cómo atravesar de forma encubierta los edificios como cobertura.
Según los investigadores, dadas diferentes tareas de misión, el comportamiento transversal aprendido más apropiado se puede activar durante el funcionamiento del robot.
Esto se hace aprovechando el control óptimo inverso, también conocido como aprendizaje por refuerzo inverso, que es una clase de aprendizaje automático que busca recuperar una función de recompensa dada una política óptima conocida.
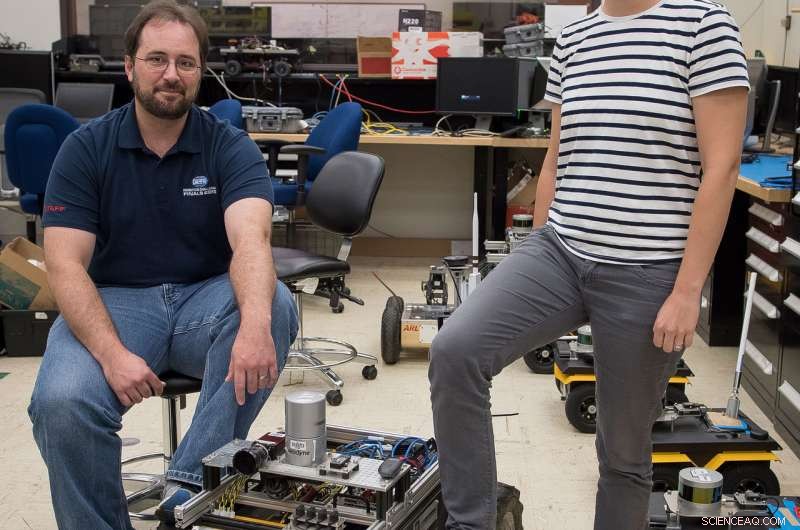
Los investigadores de ARL, los Dres. Maggie Wigness y John Rogers posan con un pequeño robot Clearpath Husky no tripulado en su laboratorio en el Adelphi Laboratory Center en Maryland. Crédito:Ejército de EE. UU.
En este caso, un ser humano demuestra la política óptima al conducir un robot a lo largo de una trayectoria que representa mejor el comportamiento que se debe aprender.
Estos ejemplos de trayectoria se relacionan luego con las características visuales del terreno / objeto, como la hierba, carreteras y edificios, para aprender una función de recompensa con respecto a estas características del entorno.
Si bien existen investigaciones similares en el campo de la robótica, lo que está haciendo ARL es especialmente único.
"Los desafíos y escenarios operativos en los que nos enfocamos aquí en ARL son extremadamente únicos en comparación con otras investigaciones que se están realizando, ", Dijo Wigness." Buscamos crear sistemas robóticos inteligentes que operen de manera confiable en entornos de guerra, lo que significa que la escena está muy desestructurada, posiblemente ruidoso, y necesitamos hacer esto dado un conocimiento a priori relativamente escaso del estado actual del medio ambiente. El hecho de que el planteamiento de nuestro problema sea tan diferente al de muchos otros investigadores permite que ARL tenga un gran impacto en la investigación de sistemas autónomos. Nuestras técnicas, por la propia definición del problema, debe ser resistente al ruido y tener la capacidad de aprender con cantidades relativamente pequeñas de datos ".
Según Wigness, Esta investigación preliminar ha ayudado a los investigadores a demostrar la viabilidad de aprender rápidamente una codificación de conductas transversales.
"A medida que llevamos esta investigación al siguiente nivel, comenzaremos a enfocarnos en comportamientos más complejos, que pueden requerir aprender de algo más que características de percepción visual, ", Dijo Wigness." Nuestro marco de aprendizaje es lo suficientemente flexible como para utilizar información a priori que puede estar disponible sobre un entorno. Esto podría incluir información sobre áreas que probablemente sean visibles para los adversarios o áreas que se sabe que tienen una comunicación confiable. Esta información adicional puede ser relevante para ciertos escenarios de misión, y aprender con respecto a estas características mejoraría la inteligencia del robot móvil ".
Los investigadores también están explorando cómo este tipo de aprendizaje conductual se transfiere entre diferentes plataformas móviles.
Su evaluación hasta la fecha se ha realizado con un pequeño robot Clearpath Husky no tripulado, which has a visual field of view that is relatively low to the ground.
"Transferring this technology to larger platforms will introduce new perception viewpoints and different platform maneuvering capabilities, " Wigness said. "Learning to encode behaviors that can be easily transferred between different platforms would be extremely valuable given a team of heterogeneous robots. En este caso, the behavior can be learned on one platform instead of each platform individually."
This research is funded through the Army's Robotics Collaborative Technology Alliance, or RCTA, which brings together government, industrial and academic institutions to address research and development required to enable the deployment of future military unmanned ground vehicle systems ranging in size from man-portables to ground combat vehicles.
"ARL is positioned to actively collaborate with other members of the RCTA, leveraging the efforts of top researchers in academia to work on Army problems, " Rogers said. "This particular research effort was the synthesis of several components of the RCTA with our internal research; it would not have been possible if we didn't work together so closely."
Por último, this research is crucial for the future battlefield, where Soldiers will be able to rely on robots with more confidence to assist them in executing missions.
"The capability for the Next Generation Combat Vehicle to autonomously maneuver at optempo in the battlefield of the future will enable powerful new tactics while removing risk to the Soldier, " Rogers said. "If the NGCV encounters unforeseen conditions which require teleoperation, our approach could be used to learn to autonomously handle these types of conditions in the future."