Gracias a sensores y músculos artificiales a microescala, La futura microelectrónica podrá adoptar formas complejas y crear interfaces bioneurales con tejido biológico sensible sin causar daños. Crédito:IFW Dresden / Universidad Tecnológica de Chemnitz
La microelectrónica flexible y adaptativa se considera un motor de innovación para aplicaciones biomédicas nuevas y más eficaces. Éstos incluyen, por ejemplo, el tratamiento de los haces nerviosos dañados, dolor crónico, o el control de miembros artificiales. Para que esto funcione, El estrecho contacto entre la electrónica y el tejido neural es esencial para un acoplamiento eléctrico y mecánico eficaz. Además, las aplicaciones potenciales surgen de la producción de herramientas quirúrgicas pequeñas y flexibles.
Un equipo internacional dirigido por el Prof.Dr. Oliver G. Schmidt, director del Instituto de Nanociencias Integrativas en el Instituto Leibniz de Investigación de Materiales y Estado Sólido (IFW) de Dresde y titular de la Cátedra de Materiales para Nanoelectrónica en la Universidad Tecnológica de Chemnitz e iniciador del Centro de Materiales, Arquitecturas e Integración de Nanomembranas (PRINCIPAL), así como Boris Rivkin, un doctorado estudiante en el grupo del profesor Schmidt, ha demostrado ahora por primera vez que tales microelectrónica adaptativa son capaces de posicionarse de manera controlada, manipular tejido biológico, y responder a su entorno analizando las señales de los sensores. Los resultados, con Rivkin como primer autor, han aparecido en la revista Sistemas inteligentes avanzados . Diferentes propiedades para procesos dinámicos combinados por primera vez en microelectrónica adaptativa
Hasta ahora, No ha sido posible que las estructuras microelectrónicas sientan y se adapten a su entorno. Aunque hay estructuras con un sensor de deformación que monitorean su propia forma, microelectrónica con sensores magnéticos que se orientan en el espacio, o dispositivos cuyo movimiento puede ser controlado por estructuras poliméricas electroactivas, una combinación de estas propiedades para su aplicación en un organismo dinámico cambiante a escala micrométrica, es decir, muy por debajo de un milímetro, no se ha informado hasta ahora. Microelectrónica inteligente y adaptativa
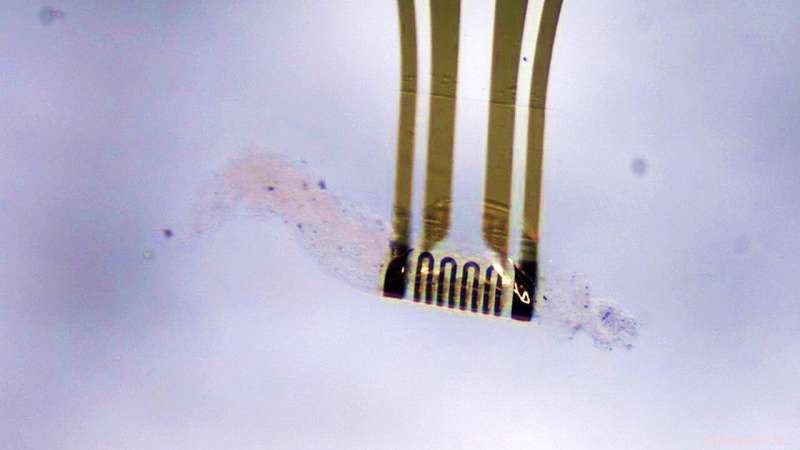
En el corazón de estas aplicaciones se encuentra una película de polímero, solo 0,5 mm de ancho y 0,35 mm de largo, que actúa como portador de los componentes microelectrónicos. En comparación, una moneda de 1 centavo tiene un diámetro de alrededor de 16 mm. En su publicación, El equipo de la Universidad Tecnológica de Chemnitz y el IFW de Leibniz en Dresde ahora presenta microelectrónica inteligente y adaptativa que utiliza músculos artificiales microscópicos para remodelar y adaptarse a entornos dinámicos gracias a la retroalimentación de sensores apropiados.
Las señales del sensor se alimentan a través de conexiones eléctricas a un microcontrolador, donde se evalúan y se utilizan para generar señales de control para los músculos artificiales. Esto permite que estas herramientas en miniatura se adapten a formas anatómicas complejas e impredecibles. Por ejemplo, Los haces de nervios siempre tienen tamaños diferentes. La microelectrónica adaptativa puede encerrar suavemente estos haces nerviosos para establecer una interfaz bioneural adecuada.
Es esencial para esto la integración de sensores de forma o posición en combinación con microactuadores. Por lo tanto, la microelectrónica adaptativa se fabrica en el llamado "proceso monolítico a escala de obleas". Las 'obleas' son sustratos planos hechos de silicona o vidrio sobre los que se fabrican los circuitos. La producción monolítica permite fabricar muchos componentes simultáneamente en paralelo en un sustrato. Esto permite una producción rápida y al mismo tiempo más rentable. Los músculos artificiales generan movimiento; es posible su uso en un entorno orgánico
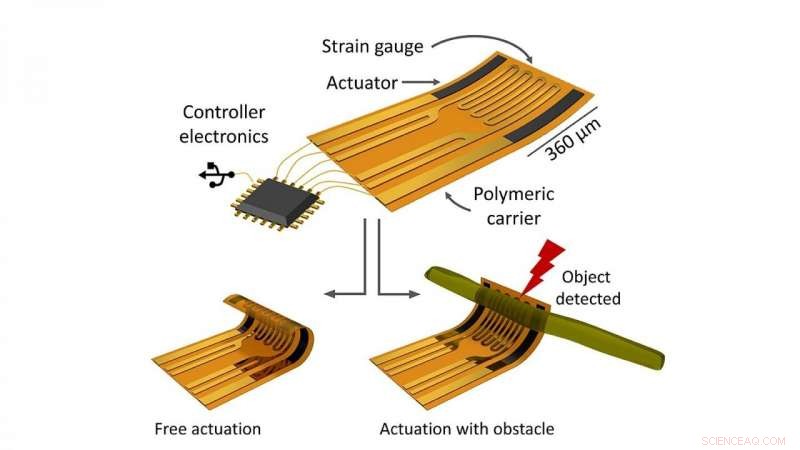
La película de polímero desarrollada por el equipo de investigación de Chemnitz y Dresden tiene solo 0,5 mm de ancho y 0,35 mm de largo. Actúa como portador de los componentes microelectrónicos y está equipado con músculos artificiales y sensores. Esto le permite percibir su entorno, reconocer objetos, y adaptarse a diferentes formas. Crédito:IFW Dresden / Universidad Tecnológica de Chemnitz
El movimiento y la remodelación de la microelectrónica adaptativa se logra mediante músculos artificiales, los llamados 'actuadores'. Estos generan movimiento al expulsar o absorber iones y, por lo tanto, pueden remodelar la película de polímero.
Este proceso se basa en el uso del polímero polipirrol (PPy). La ventaja de este método es que la manipulación de la forma se puede llevar a cabo de manera específica y con una polarización eléctrica ya muy baja (menos de un voltio). El hecho de que los músculos artificiales también sean seguros para su uso en entornos orgánicos ya ha sido demostrado por otros grupos en el pasado. Esto implicó probar el rendimiento de las micromáquinas en varios entornos relevantes para aplicaciones médicas, incluido el líquido cefalorraquídeo, sangre, plasma, y orina.
Apostando por robots microelectrónicos aún más complejos en el futuro
El equipo de Dresde y Chemnitz espera que la microelectrónica inteligente y adaptativa se convierta en microsistemas robóticos complejos a medio plazo. Boris Rivkin dice:"El siguiente paso crucial es la transición de la arquitectura previamente plana a los micro-robots tridimensionales. Trabajos anteriores han demostrado cómo las películas de polímeros planos pueden transformarse en estructuras tridimensionales mediante el plegado o enrollado autoorganizado. agregar electrónica adaptativa a dichos materiales para desarrollar sistemas como microcatéteres robóticos, diminutos brazos robóticos, e implantes neuronales maleables que actúan de forma semiautónoma siguiendo una instrucción digital ".
Dr. Daniil Karnaushenko, líder de grupo en el equipo del Prof. Oliver Schmidt, agrega, "Estos microrobots complejos requerirán una gran cantidad de actuadores y sensores individuales. Acomodar y utilizar de manera eficaz los componentes electrónicos en tal densidad es un desafío porque se necesitan más conexiones eléctricas que el espacio disponible. Esto se resolverá mediante complejos circuitos electrónicos que integrarse en la microelectrónica adaptativa en el futuro para transmitir las instrucciones adecuadas a los componentes adecuados ".
Este trabajo también contribuye al campo emergente de la cirugía asistida por robot, lo que podría permitir procedimientos menos invasivos pero más precisos. Las herramientas quirúrgicas inteligentes que generan información confiable sobre su forma y posición podrían volverse indispensables en el tratamiento de tejidos delicados.