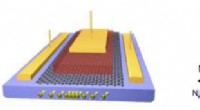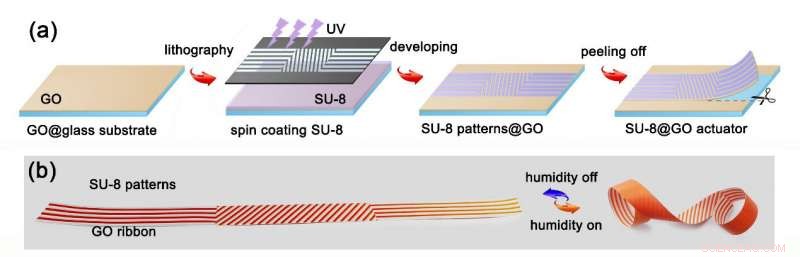
(a) Ilustración esquemática de la fabricación de película bicapa SU-8 / GO con patrón utilizando litografía UV. (b) El modelo de papel de la cinta SU-8 / GO estampada y su predecible deformación sensible a la humedad bajo la activación de la humedad. Crédito:© Science China Press
Los actuadores que pueden convertir diversos estímulos ambientales en trabajo mecánico han revelado un gran potencial para desarrollar dispositivos inteligentes como robots blandos, sistemas microelectromecánicos (MEMS), y sistemas automáticos de laboratorio en un chip. Generalmente, Las estructuras bicapa se utilizan ampliamente para el diseño y fabricación de actuadores sensibles a estímulos. En la última decada, para perseguir una deformación rápida y a gran escala, Se han dedicado grandes esfuerzos al desarrollo de nuevos materiales inteligentes. Hasta la fecha, Se han desarrollado y empleado con éxito varios materiales / estructuras de respuesta a estímulos para actuadores bimorfos.
Recientemente, El grafeno y el óxido de grafeno (GO), que poseen una serie de propiedades físico-químicas excepcionales, han surgido como un nuevo tipo de material inteligente para el diseño de actuadores. Se han informado con éxito varios actuadores bimorfos basados en grafeno. Sin embargo, estos actuadores solo son capaces de deformaciones simples, como doblarse. A lo mejor de nuestro conocimiento, Se ha prestado menos atención al refinado control de su deformación. A pesar de algunos trabajos anteriores que han informado que la dirección de plegado puede ser controlada por la capa restringida con patrón, su deformación está restringida pasivamente debido a la resistencia mecánica anisotrópica. En la actualidad, el desarrollo de actuadores bimorfos que permiten la deformación activa y programable sigue siendo una tarea desafiante.
En un nuevo artículo publicado en Beijing, Revista Nacional de Ciencias , Científicos de la Universidad de Jilin y la Universidad de Tsinghua presentan un enjambre de actuadores de grafeno autocurativo que permite la deformación 3D programable mediante la integración de matrices de patrones SU-8 con GO. A diferencia de los trabajos publicados anteriormente, el enjambre de actuadores puede realizar una deformación activa y programable bajo la acción de la humedad. Aquí, las matrices de patrones SU-8 se pueden fabricar en cualquier estructura deseada, en el que un patrón SU-8 individual puede considerarse como una capa inerte. En combinación con la capa inferior GO, cada estructura SU-8 puede formar un actuador bimorfo individual y deformarse activamente bajo estimulación.
A este respecto, Estos arreglos bicapa SU-8 / GO pueden considerarse como un enjambre de actuadores (actuador-1, actuador-2, y actuador-n). Bajo estimulación externa, cada actuador se deforma individualmente, y la deformación de toda la estructura es el acoplamiento colectivo y la coordinación del enjambre de actuadores. Por lo tanto, controlando el tamaño, forma y orientación de los patrones SU-8, se pueden programar deformaciones más complejas. Este trabajo demuestra una nueva forma de programar la deformación de actuadores bicapa, expandiendo las capacidades de los actuadores bimorfos existentes para aplicaciones en varios dispositivos inteligentes.
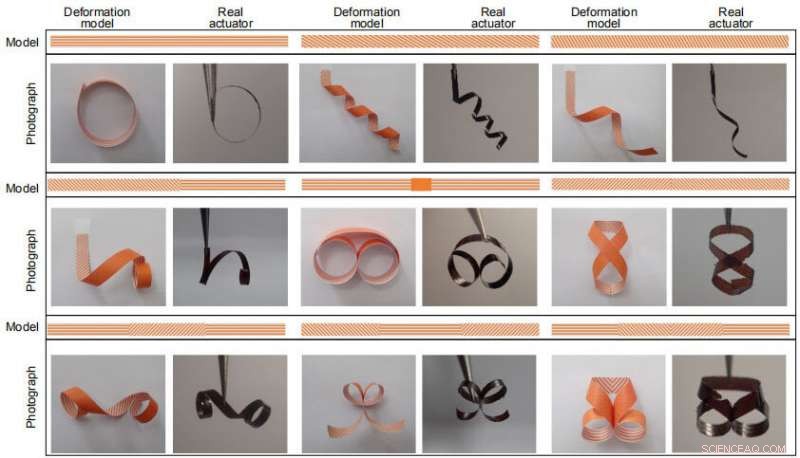
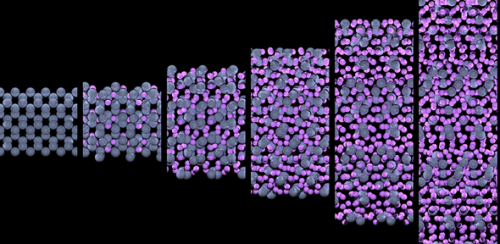
Deformaciones complejas de diferentes bicapas SU-8 / GO estampadas. Crédito:© Science China Press