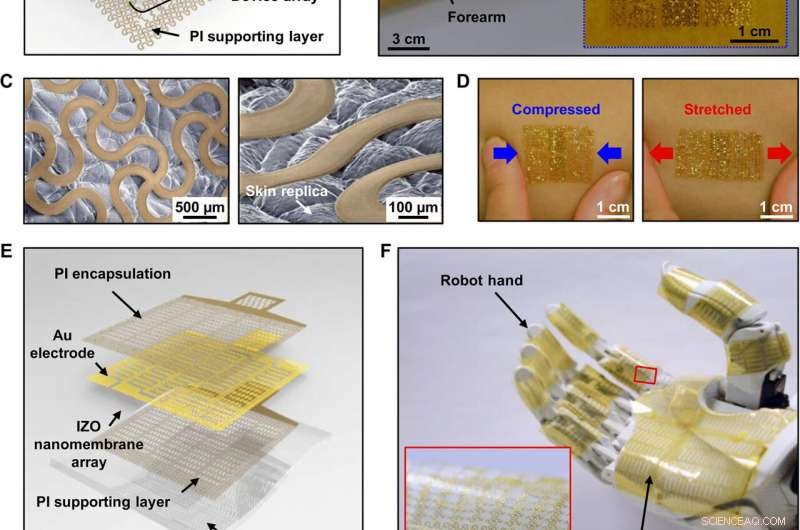
Ultradelgado estirable mecánicamente imperceptible, Dispositivo HMI multifuncional para humanos y robótica. (A) Vista esquemática en despiece de un dispositivo HMI multifuncional ultradelgado. (B) Imagen óptica del dispositivo en un antebrazo humano. El recuadro es una imagen ampliada. (C) Imagen SEM del dispositivo en una pieza de piel replicada. (D) Imágenes ópticas del dispositivo en la piel de una persona bajo deformación mecánica:comprimida (izquierda) y estirada (derecha). (E) Vista esquemática en despiece del conjunto de sensores de temperatura para la mano robótica. (F) Imagen óptica de la matriz de sensores de temperatura en una mano robótica. El recuadro es una imagen ampliada. (G) Imágenes SEM de la matriz de sensores de temperatura. (H) Imágenes ópticas de la matriz de sensores de temperatura en la mano robótica bajo deformación mecánica:doblada (izquierda) y estirada (derecha). Crédito de la foto:Kyoseung Sim Universidad de Houston. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
Las interfaces electrónicas hombre-máquina (HMI) portátiles son una clase emergente de dispositivos para facilitar las interacciones entre humanos y máquinas. Avances en electrónica, Los materiales y los diseños mecánicos han ofrecido caminos hacia dispositivos HMI portátiles comerciales. Sin embargo, Los dispositivos existentes son incómodos ya que restringen el movimiento del cuerpo humano con tiempos de respuesta lentos y desafíos para realizar múltiples funciones. En un informe reciente sobre Avances científicos, Kyoseung Sim y un equipo de investigación interdisciplinario en ciencia e ingeniería de materiales, Ingeniería Mecánica, Ingeniería Biomédica, ingeniería eléctrica e informática en EE. UU. y China, detalló el desarrollo de un nuevo polímero.
En el trabajo, diseñaron un dispositivo electrónico ultrafino extensible basado en nanomembranas, semiconductor de óxido de zinc e indio procesado con sol-gel. Las ventajas incluían multifuncionalidad, procesos de fabricación sencillos, uso imperceptible y entretela robusta. Los dispositivos HMI portátiles multifuncionales iban desde la memoria resistiva de acceso aleatorio (ReRAM) para el almacenamiento de datos hasta formar transistores de efecto de campo (FET) que interactuaban con circuitos de conmutación. Las funcionalidades adicionales incluyen sensores para la salud y la detección de movimiento corporal, y microcalentadores para proporcionar temperatura. Después de probar los componentes individuales por sus propiedades únicas, Sim y col. diseñó los dispositivos HMI como dispositivos portátiles sin costuras para humanos y también como piel protésica para robots para ofrecer retroalimentación inteligente y formar un sistema HMI (interfaz hombre-máquina) de circuito cerrado.
Las interfaces hombre-máquina (HMI) portátiles funcionan como vías de comunicación directa entre humanos y máquinas. Las interfaces pueden detectar parámetros físicos o electrofisiológicos de los usuarios y facilitar que las máquinas realicen las funciones correspondientes. Desarrollos recientes en electrónica, Los materiales y los diseños mecánicos tienen dispositivos HMI avanzados. Tales wearables son, sin embargo, todavía semisoft e incómodo para una integración perfecta debido a la incapacidad de deformarse y adaptarse a una variedad de movimientos humanos dinámicos. Los materiales electrónicos blandos que se adaptan perfectamente a los requisitos de interés ofrecen una alternativa para construir el estirable, dispositivos HMI portátiles. Sin embargo, los materiales blandos y gomosos han presentado tiempos de respuesta lentos para sufrir una histéresis sustancial tras la deformación cíclica. Relativamente, Los materiales inorgánicos pueden exhibir tiempos de respuesta rápidos y sufrir una histéresis sustancial para su adopción como dispositivos electrónicos y sensores portátiles.
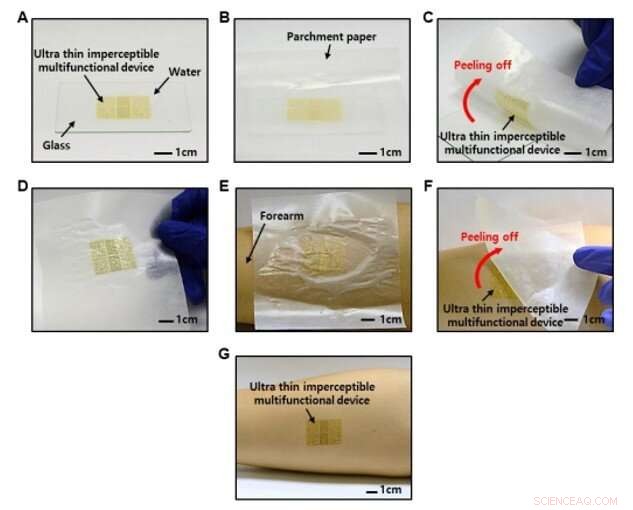
Transferencia del dispositivo HMI ultradelgado e imperceptible al antebrazo humano. (A) Un dispositivo fabricado sobre vidrio con agua aplicada. (B) Laminación de papel pergamino en la parte superior de la electrónica. (C) Recuperación del dispositivo HMI despegando el papel de pergamino. (D) Una imagen del panel de operador en papel pergamino. (E) Papel pergamino laminado con el dispositivo HMI en el antebrazo. (F) Pelar el papel de pergamino. (G) Una imagen del dispositivo HMI transferido en el antebrazo. (Crédito de la foto:Kyoseung Sim, Universidad de Houston). Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
Las propiedades únicas del material pueden facilitar las arrugas, formas serpentinas y kirigami para servir como habilitadores clave para dispositivos HMI con carácter suave y elástico. Para lograr múltiples funciones, incluida la detección, traspuesta, estimulación y almacenamiento de datos, sin embargo, Los investigadores aún deben desarrollar diversos tipos de materiales funcionales electrónicos, junto con tecnologías de integración heterogéneas, como la impresión por transferencia. Dichos dispositivos están asociados con procedimientos de fabricación complejos, incompatibilidad de ingeniería, baja escalabilidad y alto costo. Adicionalmente, a las interfaces humanas y de la máquina en equipo, Los científicos de materiales requieren una comprensión más amplia de los parámetros de interacción, evaluación y comunicación. Por lo tanto, se requieren dispositivos HMI portátiles tanto en humanos como en máquinas para formar vías de circuito cerrado de manera efectiva. Como resultado, La investigación en el campo de los materiales robóticos tiene como objetivo desarrollar dispositivos HMI portátiles para cerrar las brechas existentes en la tecnología.
En el presente trabajo, Sim y col. desarrolló un ultrafino, Dispositivo HMI mecánicamente imperceptible y extensible para ser usado en la piel humana y en un robot, para capturar datos físicos y ofrecer retroalimentación inteligente respectivamente, para crear un sistema HMI de circuito cerrado. Desarrollaron los materiales sin combinar múltiples materiales funcionales, dispositivos o pasos de integración excesivamente heterogéneos. El diseño del dispositivo ultradelgado, serpenteante, La configuración de malla abierta con capacidad de estiramiento mecánico permitió al usuario desconocer por completo el dispositivo, mientras extraía señales útiles del usuario. El dispositivo portátil recogió señales del músculo humano para guiar al robot directamente y permitirle al usuario sentir las sensaciones experimentadas por la mano del robot. El equipo de investigación estudió colectivamente los materiales y el diseño del dispositivo, fabricación y caracterización para demostrar aspectos fundamentales de la nanomembrana de óxido metálico para aplicaciones multifuncionales en dispositivos HMI.
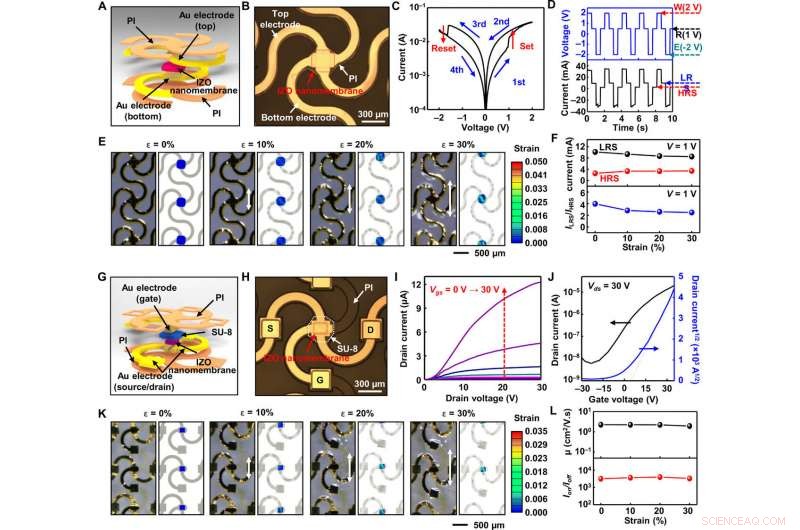
Características del ReRAM y FET. (A) Vista esquemática en despiece del ReRAM basado en nanomembranas IZO. (B) Imagen microscópica óptica del ReRAM. (C) Características I-V de la conmutación bipolar del ReRAM. (D) Ciclo WRER del ReRAM. (E) Imágenes secuenciales del ReRAM basado en nanomembranas IZO bajo tensión y los correspondientes resultados FEA de IZO. (F) Corriente en LRS y HRS e ILRS / IHRS bajo tensión. (G) Vista esquemática en despiece del IZO FET. (H) Imagen microscópica óptica del FET. (I) Características de salida del FET. (J) Características de transferencia del FET. (K) Imágenes secuenciales de los FET sometidos a tensión y los correspondientes resultados de FEA de IZO. (L) Movilidad de efecto de campo calculada de IZO e ION / IOFF del FET bajo tensión. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
Sim y col. compuso el dispositivo HMI con una matriz ReRAM (memoria de acceso aleatorio) basada en nanomembranas de óxido de indio y zinc (IZO), Matriz FET (transistor de campo efectivo), sensores de temperatura distribuidos, Sensores UV, sensores de deformación y simuladores térmicos basados en oro (Au). Diseñaron todos los dispositivos en una capa delgada (~ 2 µm) de poliimida (PI) mediante recubrimiento giratorio sobre un sustrato de sujeción de vidrio rígido para permitir la fácil liberación del dispositivo para que sea independiente. Después de muchos pasos de ingeniería intrincados, completaron la fabricación del dispositivo sumergiéndolo en un grabador de óxido de búfer (BOE) para liberar el dispositivo de la plataforma de vidrio. Usando papel de pergamino, Luego, los científicos transfirieron el dispositivo a un brazo humano sin un adhesivo adicional. Utilizaron microscopía electrónica de barrido para mostrar que el polímero de la piel no sufrió delaminación al entrar en contacto con la piel. Para formar un sistema HMI de circuito cerrado entre el ser humano y la máquina, De manera similar, los científicos desarrollaron una piel protésica compuesta de poli (dimetilsiloxano) (PDMS) y una serie de sensores para imitar las funciones sensoriales de la piel humana y la implementaron en una mano de robot.
Sim y col. realizó una caracterización detallada del semiconductor de óxido de nanomembrana IZO procesado con sol-gel sobre polímero, que fue clave para realizar múltiples funcionalidades sin una integración heterogénea. Dado que los dispositivos de almacenamiento de datos, como la memoria, eran componentes integrales en las HMI portátiles; Los científicos construyeron el ReRAM extensible basado en nanomembranas IZO con una estructura intercalada de Au / IZO / Au con encapsulación de PI (poliimida). Bajo voltaje suficiente, crearon iones de oxígeno y vacantes de oxígeno para formar un filamento conductor a través de los dos electrodos para una transición de corriente drástica del estado de alta resistencia (HRS) al estado de baja resistencia (LRS). Cuando aplicaron una polarización inversa a un voltaje específico, las vacantes de oxígeno se neutralizaron, haciendo que el filamento conductor se rompa y que la corriente disminuya drásticamente. Sim y col. realizó ciclos de escritura-lectura-borrado-escritura (WRER) y pruebas de retención para evaluar la confiabilidad del ReRAM basado en nanomembranas IZO, donde los resultados mostraron un funcionamiento estable sin degradación.
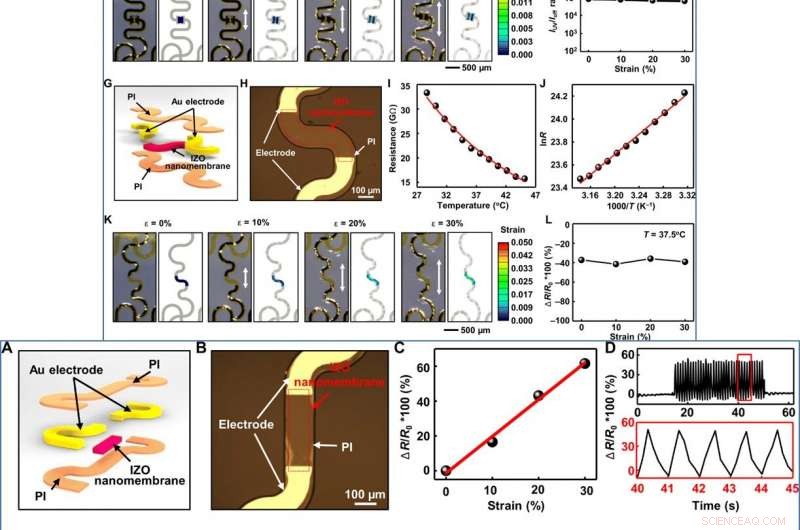
ARRIBA:Características de los sensores de temperatura y UV. (A) Vista esquemática en despiece del sensor UV basado en nanomembranas IZO. (B) Imagen microscópica óptica del sensor UV. (C) Características I-V del sensor UV. (D) Curva de calibración del sensor IZO UV. (E) Imágenes secuenciales del sensor UV bajo tensión y los correspondientes resultados FEA de IZO. (F) IUV / Idark para luz ultravioleta bajo tensión. (G) Vista esquemática en despiece del sensor de temperatura IZO. (H) Imagen microscópica óptica del sensor de temperatura. (I) Curva de calibración del sensor de temperatura. (J) Gráfico de lnR versus 1000 / T del sensor de temperatura. (K) Imágenes secuenciales del sensor de temperatura IZO bajo tensión y los correspondientes resultados FEA de IZO. (L) Cambio de resistencia relativa del sensor de temperatura bajo tensión. INFERIOR:Características del sensor de deformación. (A) Vista esquemática en despiece del sensor de deformación IZO. (B) Imagen microscópica óptica del sensor de deformación. (C) Curva de calibración del sensor de deformación. (D) Cambio de resistencia relativa del sensor de deformación bajo estiramiento y relajación cíclicos. (E) Imágenes secuenciales del sensor de deformación sometido a deformación y los correspondientes resultados FEA de IZO. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
Confirmaron el efecto de la tensión mecánica en el rendimiento del dispositivo probando el ReRAM en diferentes niveles de estiramiento mecánico utilizando una camilla hecha a medida. Los resultados mostraron que el semiconductor experimentó una tensión mínima e insignificante cuando se estiró, reflejando el diseño racional del dispositivo. Los resultados indicaron la capacidad del dispositivo ReRAM para funcionar de manera estable bajo tensión mecánica sin una degradación sustancial. El FET utilizado en el dispositivo formó de manera similar un bloque de construcción fundamental para la interfaz y la electrónica de conmutación para HMI.
Luego, los científicos probaron el sensor ultrafino de UV del polímero que se puede usar en la piel y su capacidad para monitorear la exposición a los rayos UV para aplicaciones que reduzcan el riesgo de enfermedades de la piel. Similar, probaron los efectos de la temperatura de la piel, un importante indicador de salud al medir la resistencia del termistor extensible ultrafino a diferentes temperaturas. Calcularon el coeficiente de temperatura para que fuera comparable a los voluminosos termistores disponibles comercialmente. El equipo de investigación también desarrolló un sensor de deformación basado en nanomembranas IZO para la comunicación entre un humano y un robot para resaltar la versatilidad del material IZO. Sim y col. comparó los resultados experimentales con el análisis de elementos finitos (FEA) para calcular el perfil de deformación del área de detección de IZO bajo diferentes niveles de estiramiento mecánico. Las simulaciones coincidieron bien con los resultados experimentales.
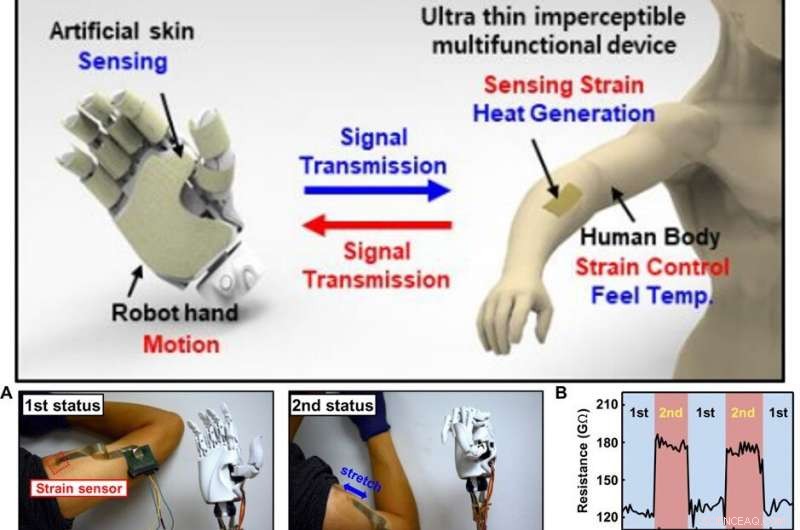
ARRIBA:Ilustración esquemática de una HMI de circuito cerrado. INFERIOR:HMI de circuito cerrado portátil. (A) Imagen representativa del movimiento humano para controlar la mano robótica. (B) Cambio de resistencia del sensor de tensión en la piel humana bajo diferentes movimientos humanos. (C) Imagen representativa de la imitación del movimiento humano. (D) Cambio de resistencia del sensor de tensión en la imitación del movimiento humano. (E) Imagen representativa de la mano robótica, con el sensor de temperatura tocando la mano humana. (F) Cambio de resistencia del sensor de temperatura en la mano robótica mientras la mano humana sostiene el robot. (G) Vista esquemática en despiece del microcalentador resistivo. (H) Mapeo de temperatura IR del microcalentador. (I) Cambio dinámico de temperatura bajo diferentes voltajes aplicados. (J) Curva de calibración del microcalentador. Crédito de la foto:Kyoseung Sim Universidad de Houston. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
Después de probar las funciones individuales del dispositivo multifuncional, Sim y col. demostró la multifuncionalidad de las HMI interactivas de circuito cerrado. Cuando los sensores portátiles en la piel humana detectan señales como el movimiento humano inducido por tensión, las señales detectadas podrían controlar el movimiento de la mano robótica. Por ejemplo, cuando el equipo de investigación colocó el sensor de tensión IZO en el hombro humano, detectó tensión por el movimiento del brazo humano o cuando el usuario agarró un objeto. En paralelo, la piel protésica basada en el sensor de temperatura IZO de la mano robótica detectó la temperatura del ambiente externo o del objeto agarrado para determinar el voltaje adecuado para aplicar a un estimulador térmico suave en la piel humana para transmitir la sensación. Sobre la base de una serie de tales interacciones coordinadas, los científicos crearon un sistema HMI interactivo de circuito cerrado.
De este modo, Kyoseung Sim y sus colegas diseñaron una nanomembrana de óxido de metal IZO procesada con sol-gel-sobre-polímero y exhibieron su versatilidad en relación con los dispositivos ultrafinos de memoria blanda. transistores, sensores de temperatura, sensores de deformación y sensores UV. Formaron el dispositivo multifuncional simultáneamente en un proceso de un solo paso sin ninguna integración heterogénea. Los sensores portátiles combinados ultrafinos y elásticos habilitados para electrónica, La piel protésica y el dispositivo actuador para interfaces hombre-robot demostraron la viabilidad del sistema HMI de circuito cerrado. Esta configuración allanará el camino hacia la rentabilidad, Fabricación escalable y dispositivos HMI portátiles capaces de integrarse sin problemas con el usuario. Los científicos prevén que el HMI portátil se convertirá en una tecnología vital con capacidades mejoradas, comodidad y conveniencia para un trabajo en equipo efectivo entre máquinas y humanos.
© 2019 Science X Network