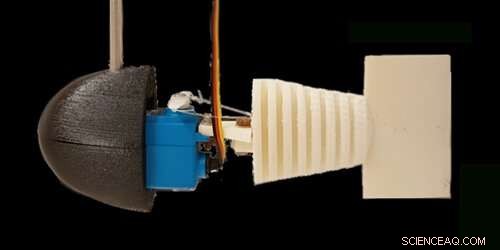
Unidad robótica simple de los investigadores. El material blanco está impreso en 3D utilizando polímeros deformables. Un servomotor (azul) acciona dos cables que proporciona la deformación del robot. La parte oscura está impresa en 3D en un material sólido. Crédito:Sánchez-Rodríguez et al.
Durante las ultimas décadas, los roboticistas han desarrollado una variedad de robots inspirados en la naturaleza, humanos y animales. Para imitar efectivamente a animales o humanos, sin embargo, estos robots no solo deberían parecerse a ellos; también deberían moverse de manera similar.
Investigadores de la Université Côte d'Azur-CNRS han introducido recientemente un nuevo mecanismo bioinspirado para lograr nadar como peces en robots. Este mecanismo, introducido en un artículo publicado en Cartas de revisión física , se basa en lo que se conoce como propiocepción, la capacidad de los animales para recopilar información sobre la posición de sus cuerpos, movimiento y aceleración.
"Con mis colegas M. Gazzola y L. Mahadevan, Hemos descubierto una ley general que predice la velocidad de los nadadores submarinos macroscópicos en función de la forma de andar, es decir., la amplitud y la frecuencia del movimiento de la aleta / cola, "Méderic Argentina, uno de los investigadores que realizó el estudio, dicho Phys.org . "Nuestro trabajo proporcionó una explicación racional de esta ley de escala que funcionó en nadadores de unos pocos centímetros de longitud para los animales más grandes, como las ballenas azules (30 m) ".
Para probar su modelo, los investigadores querían recopilar datos cinemáticos de la ondulación de la cola, que aún no se ha medido en animales vivos. Además, tenían curiosidad por saber qué mecanismos permiten a un nadador determinado seleccionar la amplitud y frecuencia del movimiento de su cola. Lograr esto, construyeron un pequeño robot compatible con un cuerpo que puede deformarse biomiméticamente.
"Esta plataforma robótica nos permitió validar nuestra ley de escalado, sino también para explorar escenarios para la selección de la cinemática de ondulación, "Dijo Argentina." Parecía natural que la propiocepción debería ser un excelente candidato, ya que es un sentido (a veces llamado como el sexto sentido) que evalúa la deformación corporal, su aceleración o la fuerza sentida. En nuestro artículo reciente, cuestionamos si un circuito de retroalimentación controlado por propiocepción podría desencadenar la locomoción y nuestro trabajo demostró que, de hecho, los sensores propioceptivos pueden inducir una natación agradable y constante ".
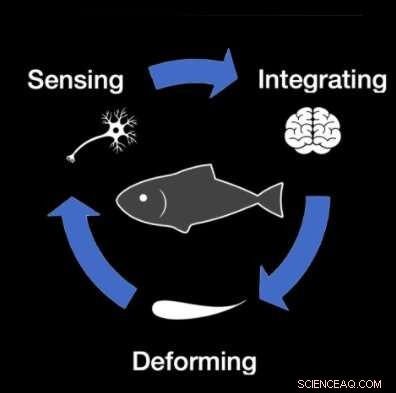
Crédito:Sánchez-Rodríguez et al.
La principal ventaja del mecanismo propioceptivo introducido por Argentina y sus colegas es que permite a los nadadores robóticos adaptar su ondulación al entorno que los rodea. al igual que muchos peces. De hecho, la mayoría de los peces tienen líneas laterales que pueden medir la presión del líquido en su cuerpo, permitiéndoles integrar los sentidos propioceptivos.
"Nuestra idea era aprovechar la retroalimentación de la fuerza sentida del robot a la deformación de la cola, ", Dijo Argentina." Este enfoque es, por lo tanto, simple, robusto y podría explicar la selección de los pasos de natación ".
Los investigadores probaron el mecanismo propioceptivo que desarrollaron en un robot biomimético real, comparando su rendimiento con el obtenido al utilizar un modelo genérico para la natación robótica. Sus hallazgos fueron muy prometedores, ya que su mecanismo se comparaba favorablemente con el modelo genérico y permitía nadar como un pez en el robot.
"La propiocepción también puede ser el primer paso para crear robots ondulantes que sintonicen automáticamente su cinemática con el entorno, ", Dijo Argentina." Nuestro trabajo demostró que este simple acoplamiento de la propiocepción con el movimiento de la cola podría desencadenar una inestabilidad que hace que la cola se ondule y empuje al nadador ".
En el futuro, el mecanismo propioceptivo ideado por este equipo de investigadores podría permitir el desarrollo de robots acuáticos que puedan moverse con mayor eficacia en el agua. Mientras tanto, Argentina y sus colegas continuarán trabajando en su robot para mejorar sus capacidades.
"Actualmente estamos enseñando al robot a nadar utilizando técnicas de aprendizaje automático, ", Dijo Argentina." Nuestros primeros resultados nos dan mucha confianza en que deberíamos ser capaces de construir / diseñar robots ondulantes que naden usando IA ".
© 2021 Science X Network