Crédito:Universidad Estatal de Carolina del Norte
Un equipo de investigadores en ingeniería ha logrado un avance fundamental en el control de los llamados robots blandos, utilizando campos magnéticos para manipular de forma remota cadenas de micropartículas incrustadas en dispositivos robóticos blandos. Los investigadores ya han creado varios dispositivos que hacen uso de la nueva técnica.
"Al poner estas cadenas autoensambladas en robots blandos, podemos hacer que realicen funciones más complejas al tiempo que conservan diseños relativamente simples, "dice Joe Tracy, profesor asociado de ciencia e ingeniería de materiales en la Universidad Estatal de Carolina del Norte y autor correspondiente de un artículo sobre el trabajo. "Las posibles aplicaciones de estos dispositivos van desde bombas activadas de forma remota para la administración de fármacos hasta el desarrollo de estructuras desplegables de forma remota".
La nueva técnica se basa en trabajos anteriores en el campo del autoensamblaje, compuestos accionados magnéticamente por Tracy y Orlin Velev, el Profesor INVISTA de Ingeniería Química y Biomolecular en NC State.
Para este estudio, los investigadores introdujeron micropartículas de hierro en una mezcla de polímero líquido y luego aplicaron un campo magnético para inducir a las micropartículas a formar cadenas paralelas. Luego se secó la mezcla, dejando tras de sí una fina película de polímero elástico incrustada con las cadenas alineadas de partículas magnéticas.
“Las cadenas nos permiten manipular el polímero de forma remota como un robot blando controlando un campo magnético que afecta a las cadenas de partículas magnéticas, "Dice Tracy.
Específicamente, la dirección del campo magnético y su fuerza se pueden variar. Las cadenas de micropartículas de hierro responden alineándose ellas mismas y el polímero circundante en la misma dirección que el campo magnético aplicado.
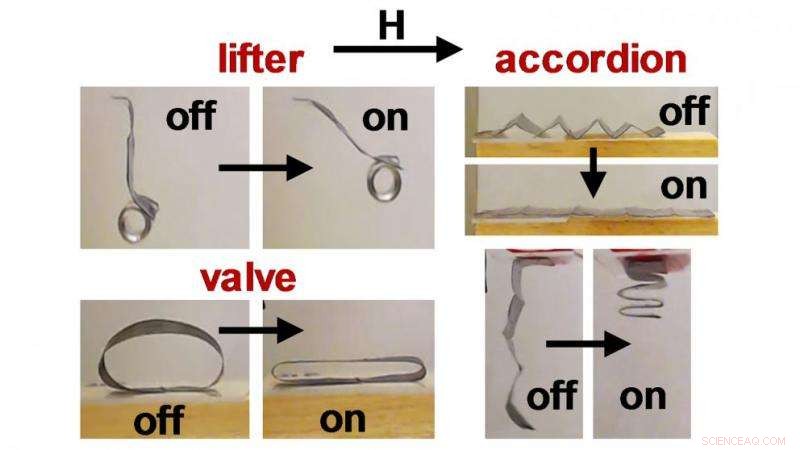
Usando esta técnica, los investigadores han creado tres tipos de robots blandos. Un dispositivo es un voladizo que puede levantar hasta 50 veces su propio peso. El segundo dispositivo es una estructura similar a un acordeón que se expande y contrae, imitando el comportamiento del músculo. El tercer dispositivo es un tubo que está diseñado para funcionar como una bomba peristáltica:una sección comprimida viaja a lo largo del tubo, al igual que alguien que exprime el último trozo de pasta de dientes pasando el dedo por el tubo.
"Ahora estamos trabajando para mejorar tanto el control como la potencia de estos dispositivos, para avanzar en el potencial de la robótica blanda, "Dice Tracy.
Los investigadores también han desarrollado una métrica para evaluar el rendimiento de los elevadores magnéticos, como el dispositivo voladizo.
"Hacemos esto midiendo la cantidad de peso que se levanta y teniendo en cuenta tanto la masa de partículas en el levantador como la fuerza del campo magnético que se aplica, "dice Ben Evans, coautor del artículo y profesor asociado de física en la Universidad de Elon. "Creemos que esta es una herramienta útil para los investigadores en esta área que quieran encontrar una forma empírica de comparar el rendimiento de diferentes dispositivos".