Oye, los robots pueden jugar a atraparla. Robot Justin, un sistema humanoide de dos brazos, desarrollado por la agencia aérea y espacial alemana, Deutsches Zentrum fur Luft- und Raumfahrt, Puede realizar tareas determinadas de forma autónoma, como atrapar pelotas o servir café. Ver más imágenes de robots. © Michael Dalder / Reuters / Corbis
Oye, los robots pueden jugar a atraparla. Robot Justin, un sistema humanoide de dos brazos, desarrollado por la agencia aérea y espacial alemana, Deutsches Zentrum fur Luft- und Raumfahrt, Puede realizar tareas determinadas de forma autónoma, como atrapar pelotas o servir café. Ver más imágenes de robots. © Michael Dalder / Reuters / Corbis Ser humano es mucho más fácil que construir un ser humano.
Tome algo tan simple como jugar a la pelota con un amigo en el jardín delantero. Cuando se divide esta actividad en las funciones biológicas discretas necesarias para realizarla, no es nada simple. Necesitas sensores transmisores y efectores. Debes calcular la fuerza de lanzamiento en función de la distancia entre tú y tu compañero. Debes tener en cuenta el resplandor del sol, velocidad del viento y distracciones cercanas. Debe determinar con qué firmeza agarrar la pelota y cuándo apretar el guante durante una recepción. Y necesita poder procesar una serie de escenarios hipotéticos:¿Qué pasa si la pelota pasa por encima de mi cabeza? ¿Y si sale rodando a la calle? ¿Qué pasa si choca contra la ventana de mi vecino?
Estas preguntas demuestran algunos de los desafíos más urgentes de la robótica, y prepararon el escenario para nuestra cuenta regresiva. Hemos compilado una lista de las 10 cosas más difíciles de enseñar a los robots ordenados aproximadamente de "más fácil" a "más difícil":10 cosas que tendremos que conquistar si alguna vez vamos a cumplir las promesas hechas por Bradbury. Polla, Asimov, Clarke y todos los demás narradores que han imaginado un mundo en el que las máquinas se comportan como personas.
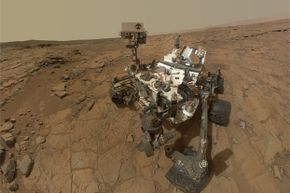 La prueba de navegación definitiva para un robot:¡Marte! Hasta aquí, La curiosidad ha demostrado ser bastante hábil. Imagen cortesía de NASA / JPL-Caltech / MSSS
La prueba de navegación definitiva para un robot:¡Marte! Hasta aquí, La curiosidad ha demostrado ser bastante hábil. Imagen cortesía de NASA / JPL-Caltech / MSSS Pasar del punto A al punto B suena muy fácil. Los humanos lo hacemos todo el día cotidiano. Para un robot, aunque, La navegación, especialmente a través de un único entorno que cambia constantemente o entre entornos en los que nunca se ha encontrado antes, puede ser un negocio complicado. Primero, el robot debe poder percibir su entorno, y luego debe poder dar sentido a los datos entrantes.
Los especialistas en robótica abordan el primer problema armando sus máquinas con una serie de sensores, escáneres cámaras y otras herramientas de alta tecnología para evaluar su entorno. Los escáneres láser se han vuelto cada vez más populares, aunque no se pueden utilizar en entornos acuáticos porque el agua tiende a interrumpir la luz y reduce drásticamente el alcance del sensor. La tecnología de sonda ofrece una opción viable en robots submarinos, pero en aplicaciones terrestres, es mucho menos preciso. Y, por supuesto, un sistema de visión que consta de un conjunto de cámaras estereoscópicas integradas puede ayudar a un robot a "ver" su paisaje.
Recopilar datos sobre el medio ambiente es solo la mitad de la batalla. El mayor desafío consiste en procesar esos datos y usarlos para tomar decisiones. Muchos investigadores hacen que sus robots naveguen utilizando un mapa preespecificado o construyendo un mapa sobre la marcha. En robótica, esto se conoce como GOLPE - localización y mapeo simultáneos . El mapeo describe cómo un robot convierte la información recopilada con sus sensores en una representación determinada. La localización describe cómo se posiciona un robot en relación con el mapa. En la práctica, estos dos procesos deben ocurrir simultáneamente, creando un acertijo del huevo y la gallina que los investigadores han podido superar con computadoras más potentes y algoritmos avanzados que calculan la posición en función de probabilidades.
 Veintiuno un robot destinado a ayudar a las personas mayores y discapacitadas en la casa, demuestra su capacidad para sostener objetos delicados manipulando una pajita para beber entre sus dedos en la Universidad de Waseda en Tokio el 8 de enero. 2009. © Issei Kato / Reuters / Corbis
Veintiuno un robot destinado a ayudar a las personas mayores y discapacitadas en la casa, demuestra su capacidad para sostener objetos delicados manipulando una pajita para beber entre sus dedos en la Universidad de Waseda en Tokio el 8 de enero. 2009. © Issei Kato / Reuters / Corbis Los robots llevan años recogiendo paquetes y piezas en fábricas y almacenes. Pero generalmente evitan a los humanos en estas situaciones, y casi siempre funcionan con objetos de formas consistentes en entornos libres de desorden. La vida está mucho menos estructurada para cualquier robot que se aventure más allá de la fábrica. Si tal máquina alguna vez espera funcionar en hogares u hospitales, Necesitará un sentido del tacto avanzado capaz de detectar personas cercanas y seleccionar un elemento de una colección desordenada de cosas.
Estas son habilidades difíciles de aprender para un robot. Tradicionalmente, los científicos evitaron el contacto por completo, programar sus máquinas para que fallen si entraban en contacto con otro objeto. Pero en los últimos cinco años más o menos, Ha habido avances significativos en diseños compatibles y piel artificial. Cumplimiento se refiere al nivel de flexibilidad de un robot. Las máquinas altamente flexibles son más compatibles; las máquinas rígidas lo son menos.
En 2013, Los investigadores de Georgia Tech construyeron un brazo robótico con resortes para articulaciones, lo que permite que el apéndice se doble e interactúe con su entorno más como un brazo humano. Próximo, lo cubrieron todo con una "piel" capaz de sentir la presión o el tacto. Algunas pieles de robot contienen placas de circuito hexagonales entrelazadas, cada uno con sensores infrarrojos que pueden detectar cualquier cosa que se acerque más a un centímetro. Otros vienen equipados con "huellas digitales" electrónicas:superficies elevadas y estriadas que mejoran el agarre y facilitan el procesamiento de la señal.
Combine estos brazos de alta tecnología con sistemas de visión mejorados, y obtienes un robot que puede ofrecer una tierna caricia o meter la mano en los gabinetes para seleccionar un artículo de una colección más grande.
 El ingeniero de mecatrónica Ben Schaefer interactúa con el barman robot humanoide Carl mientras prepara una bebida en el Robots Bar and Lounge en Alemania el 26 de julio. 2013. Desarrollado por Schaefer, Carl también puede interactuar con los clientes en pequeñas conversaciones. © Fabrizio Bensch / Reuters / Corbis
El ingeniero de mecatrónica Ben Schaefer interactúa con el barman robot humanoide Carl mientras prepara una bebida en el Robots Bar and Lounge en Alemania el 26 de julio. 2013. Desarrollado por Schaefer, Carl también puede interactuar con los clientes en pequeñas conversaciones. © Fabrizio Bensch / Reuters / Corbis Alan M. Turing, uno de los fundadores de la informática, hizo una predicción audaz en 1950:las máquinas algún día serían capaces de hablar con tanta fluidez que no podríamos distinguirlas de los humanos. Pobre de mí, Los robots (incluso Siri) no han estado a la altura de las expectativas de Turing, todavía. Eso es porque el reconocimiento de voz es muy diferente a procesamiento natural del lenguaje - lo que hace nuestro cerebro para extraer significado de palabras y oraciones durante una conversación.
Inicialmente, Los científicos pensaron que sería tan simple como conectar las reglas de la gramática en los bancos de memoria de una máquina. Pero la codificación rígida de un manual gramatical para cualquier idioma ha resultado imposible. Incluso proporcionar reglas sobre los significados de palabras individuales ha hecho que el aprendizaje de idiomas sea una tarea abrumadora. ¿Necesitas un ejemplo? Piense en "nuevo" y "sabía" o "banco" (un lugar para poner dinero) y "banco" (el lado de un río). Resulta que los humanos le dan sentido a estas idiosincrasias lingüísticas confiando en las capacidades mentales desarrolladas durante muchos años. muchos años de evolución, y los científicos no han podido dividir estas capacidades en discretas, reglas identificables.
Como resultado, Hoy en día, muchos robots basan su procesamiento de lenguaje en estadísticas. Los científicos los alimentan con enormes colecciones de texto, conocido como cuerpo , y luego dejar que sus computadoras dividan el texto más largo en trozos para averiguar qué palabras suelen unirse y en qué orden. Esto permite que el robot "aprenda" un idioma basado en análisis estadístico. Por ejemplo, a un robot, la palabra "murciélago" acompañada de la palabra "mosca" o "ala" se refiere al mamífero volador, mientras que "bate" seguido de "pelota" o "guante" se refiere al deporte de equipo.
 Un robot muestra sus habilidades de escritura durante un concurso de robots inteligentes creado por estudiantes universitarios en la Universidad de Ciencia y Tecnología de Anhui de China el 16 de noviembre. 2012. © Chen Bin / Xinhua Press / Corbis
Un robot muestra sus habilidades de escritura durante un concurso de robots inteligentes creado por estudiantes universitarios en la Universidad de Ciencia y Tecnología de Anhui de China el 16 de noviembre. 2012. © Chen Bin / Xinhua Press / Corbis Digamos que alguien que nunca ha jugado al golf quiere aprender a hacer swing con un palo. Podría leer un libro sobre eso y luego probarlo, o podría ver a un golfista experimentado realizar los movimientos adecuados, un enfoque más rápido y sencillo para aprender el nuevo comportamiento.
Los roboticistas se enfrentan a un dilema similar cuando intentan construir una máquina autónoma capaz de aprender nuevas habilidades. Una aproximación, como en el ejemplo del golf, consiste en dividir una actividad en pasos precisos y luego programar la información en el cerebro del robot. Esto supone que se pueden analizar todos los aspectos de la actividad, descrito y codificado, cuales, como resulta, no siempre es fácil de hacer. Hay ciertos aspectos del swing con un palo de golf, por ejemplo, que posiblemente no se puede describir, como la interacción de la muñeca y el codo. Estos detalles sutiles se pueden comunicar mucho más fácilmente mostrándolos en lugar de contando.
En años recientes, Los investigadores han tenido cierto éxito al enseñar a los robots a imitar a un operador humano. Ellos llaman a esto aprendizaje de imitación o aprendiendo de la demostración ( LfD ), y lo logran armando sus máquinas con conjuntos de cámaras de gran angular y zoom. Este equipo permite al robot "ver" a un maestro humano realizando un proceso o actividad específicos. Luego, los algoritmos de aprendizaje procesan estos datos para producir un mapa de funciones matemáticas que conecta la entrada visual con las acciones deseadas. Por supuesto, Los robots en escenarios LfD deben poder ignorar ciertos aspectos del comportamiento de su maestro, como rascarse un picor, y lidiar con problemas de correspondencia. que se refiere a las formas en que la anatomía de un robot se diferencia de la de un humano.
Las ardillas se practican en el arte del engaño, así que los investigadores han recurrido a estos astutos roedores en busca de algunas ideas sobre cómo enseñar a los robots comportamientos engañosos. John Foxx / Stockbyte / Thinkstock El fino arte del engaño ha evolucionado para ayudar a los animales a adelantarse a sus competidores y evitar que los depredadores se los coman. Con práctica, la habilidad puede convertirse en un mecanismo de supervivencia muy eficaz.
Para robots, aprender a engañar a una persona u otro robot ha sido un desafío (y eso podría estar bien para usted). El engaño requiere imaginación, la capacidad de formar ideas o imágenes de objetos externos que no están presentes para los sentidos, que es algo de lo que normalmente carecen las máquinas (consulte el siguiente elemento de nuestra lista). Son excelentes para procesar la entrada directa de los sensores, cámaras y escáneres, pero no tan bueno para formar conceptos que existen más allá de todos esos datos sensoriales.
Sin embargo, los robots del futuro pueden estar mejor versados en los trucos. Los investigadores de Georgia Tech han podido transferir algunas habilidades engañosas de las ardillas a los robots en su laboratorio. Primero, estudiaron los roedores peludos, que protegen sus escondites de comida enterrada al llevar a los competidores a viejos, cachés no utilizados. Luego codificaron esos comportamientos en reglas simples y las cargaron en el cerebro de sus robots. Las máquinas pudieron usar los algoritmos para determinar si el engaño podría ser útil en una situación determinada. Si es así, luego pudieron proporcionar una comunicación falsa que llevó a un robot compañero lejos de su escondite.
 Si los humanos van a pasar mucho tiempo con robots, como este humanoide apodado ROBOY, las máquinas tendrán que mejorar un poco a la hora de predecir lo que harán los seres humanos aparentemente impredecibles a continuación. © Erik Tham / Corbis
Si los humanos van a pasar mucho tiempo con robots, como este humanoide apodado ROBOY, las máquinas tendrán que mejorar un poco a la hora de predecir lo que harán los seres humanos aparentemente impredecibles a continuación. © Erik Tham / Corbis En "Los Supersónicos, "Rosie, la criada robot, pudo mantener conversaciones, cocinar comidas, limpiar la casa y atender las necesidades y deseos de George, Jane Judy y Elroy. Para comprender el desarrollo avanzado de Rosie, considere esta escena del primer episodio de la primera temporada:Sr. Spacely, El jefe de George, viene a la casa de los Jetson a cenar. Despues de comer, El Sr. Spacely saca un puro y se lo lleva a la boca, lo que hace que Rosie se apresure con un encendedor. Esta simple acción representa un comportamiento humano complejo:la capacidad de anticipar lo que viene a continuación en función de lo que acaba de suceder.
Como el engaño anticipar la acción humana requiere que un robot imagine un estado futuro. Debe poder decir "Si observo a un humano haciendo x, entonces puedo esperar basado en experiencia previa, que probablemente lo seguirá con y ". Este ha sido un serio desafío en robótica, pero los humanos están progresando. En la Universidad de Cornell, un equipo ha estado trabajando para desarrollar un robot autónomo que pueda reaccionar en función de cómo un compañero interactúa con los objetos del entorno. Para lograr esto, el robot utiliza un par de cámaras 3D para obtener una imagen del entorno. Próximo, un algoritmo identifica los objetos clave en la habitación y los aísla del desorden de fondo. Luego, utilizando una gran cantidad de información recopilada de sesiones de capacitación anteriores, el robot genera un conjunto de probables anticipaciones basadas en el movimiento de la persona y los objetos que toca. El robot hace una mejor suposición de lo que sucederá a continuación y actúa en consecuencia.
Los robots de Cornell todavía adivinan mal algunas veces, pero están progresando constantemente especialmente a medida que mejora la tecnología de la cámara.
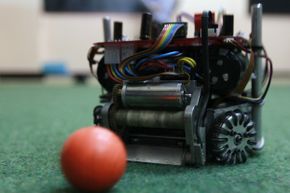 Primer plano de un miembro del equipo de fútbol de robots de Columbia. Una de las ligas de fútbol de RoboCup cuenta con varios robots totalmente autónomos que trabajan juntos para practicar este deporte. ¡Otra liga cuenta con robots humanoides! © John Vizcaino / Reuters / Corbis
Primer plano de un miembro del equipo de fútbol de robots de Columbia. Una de las ligas de fútbol de RoboCup cuenta con varios robots totalmente autónomos que trabajan juntos para practicar este deporte. ¡Otra liga cuenta con robots humanoides! © John Vizcaino / Reuters / Corbis Construyendo un solo máquina a gran escala:un androide, si lo desea, requiere importantes inversiones de tiempo, energía y dinero. Otro enfoque implica el despliegue de un ejército de Robots más simples que luego trabajan juntos para realizar tareas más complejas.
Esto trae un conjunto diferente de desafíos. Un robot que trabaja dentro de un equipo debe poder posicionarse con precisión en relación con sus compañeros de equipo y debe poder comunicarse de manera efectiva, con otras máquinas y con operadores humanos. Para solucionar estos problemas, los científicos se han volcado al mundo de los insectos, que exhiben un comportamiento de enjambre complejo para encontrar comida y completar tareas que benefician a toda la colonia. Por ejemplo, estudiando hormigas, Los investigadores saben que los individuos usan feromonas para comunicarse entre sí.
Los robots pueden utilizar esta misma "lógica de feromonas, "aunque dependen de la luz, no productos químicos, comunicar. Funciona así:un grupo de pequeños robots se dispersa en un área confinada. En primer lugar, exploran el área al azar hasta que un individuo se encuentra con un rastro de luz dejado por otro robot. Sabe seguir el rastro y lo hace, dejando su propio rastro de luz a medida que avanza. A medida que el sendero se refuerza, cada vez más bots lo encuentran y se unen al tren de vagones. Algunos investigadores también han tenido éxito utilizando chirridos audibles. El sonido se puede utilizar para asegurarse de que los robots individuales no se alejen demasiado o para atraer a los compañeros de equipo a un elemento de interés.
 Una hidra muestra su capacidad de autorreplicación, uno que a algunos robotocistas no les importaría incorporar en sus máquinas. luismmolina / iStock / Thinkstock
Una hidra muestra su capacidad de autorreplicación, uno que a algunos robotocistas no les importaría incorporar en sus máquinas. luismmolina / iStock / Thinkstock Dios les dijo a Adán y Eva, "Sean fructíferos y multiplíquense, y reponer la tierra ". Un robot que recibiera el mismo comando se sentiría desconcertado o frustrado. ¿Por qué? Porque la autorreplicación ha resultado difícil de alcanzar. Una cosa es construir un robot y otra completamente distinta es construir un robot que pueda hacer copias de sí mismo o regenerar componentes perdidos o dañados.
Curiosamente, los robots pueden no considerar a los humanos como modelos reproductivos. Quizás haya notado que en realidad no nos dividimos en dos partes idénticas. Animales simples, sin embargo, haz esto todo el tiempo. Los familiares de medusas conocidas como hidra practican una forma de reproducción asexual conocida como en ciernes :Un pequeño saco se hincha hacia afuera desde el cuerpo del padre y luego se rompe para convertirse en un nuevo, individuo genéticamente idéntico.
Los científicos están trabajando en robots que puedan llevar a cabo este procedimiento básico de clonación. Muchos de estos robots se construyen a partir de elementos repetidos, generalmente cubos, que contienen maquinaria idéntica y el programa de autorreplicación. Los cubos tienen imanes en sus superficies para que puedan adherirse y separarse de otros cubos cercanos. Y cada cubo se divide en dos piezas a lo largo de una diagonal para que cada mitad pueda girar de forma independiente. Un robot completo, luego, consta de varios cubos dispuestos en una configuración específica. Siempre que haya un suministro de cubos disponible, un solo robot puede inclinarse, retire cubos de su "cuerpo" para sembrar una nueva máquina y luego recoja los bloques de construcción del alijo hasta que dos robots completamente formados estén uno al lado del otro.
 Si construye robots autónomos letales que no requieren operadores humanos, ¿Cómo exactamente programarías la ética? © Fang Zhe / Xinhua Press / Corbis
Si construye robots autónomos letales que no requieren operadores humanos, ¿Cómo exactamente programarías la ética? © Fang Zhe / Xinhua Press / Corbis A medida que interactuamos con la gente a lo largo del día, tomamos cientos de decisiones. En cada uno, comparamos nuestras elecciones con lo que está bien y lo que está mal, lo que es justo e injusto. Si queremos que los robots se comporten como nosotros, necesitarán una comprensión de la ética.
Como el lenguaje codificar el comportamiento ético es un desafío enorme, principalmente porque no existe un conjunto general de principios éticos universalmente aceptados. Las diferentes culturas tienen diferentes reglas de conducta y diferentes sistemas de leyes. Incluso dentro de las culturas, Las diferencias regionales pueden afectar la forma en que las personas evalúan y miden sus acciones y las acciones de quienes las rodean. Tratar de escribir un manual de ética relevante a nivel mundial que los robots pudieran usar como herramienta de aprendizaje sería prácticamente imposible.
Con eso dicho, Recientemente, los investigadores han podido construir robots éticos limitando el alcance del problema. Por ejemplo, una máquina confinada a un entorno específico:una cocina, decir, o la habitación de un paciente en un centro de vida asistida - tendría muchas menos reglas que aprender y tendría un éxito razonable en la toma de decisiones éticamente sólidas. Para lograr esto, Los ingenieros de robots ingresan información sobre opciones consideradas éticas en casos seleccionados en un algoritmo de aprendizaje automático. Las opciones se basan en tres criterios de escala móvil:cuánto bien resultaría una acción, cuánto daño evitaría y una medida de justicia. A continuación, el algoritmo genera un principio ético que el robot puede utilizar al tomar decisiones. Usando este tipo de inteligencia artificial, su robot doméstico del futuro podrá determinar quién en la familia debe lavar los platos y quién puede controlar el control remoto del televisor por la noche.
Junto con sus habilidades emotivas, Nao claramente sabe cómo relajarse. © Gerd Roth / dpa / Corbis "Las cosas mejores y más bellas del mundo no se pueden ver ni tocar. Hay que sentirlas con el corazón". Si esta observación de Helen Keller es cierta, entonces los robots estarían destinados a perderse lo mejor y lo bello. Después de todo, son excelentes para sentir el mundo que los rodea, pero no pueden convertir esos datos sensoriales en emociones específicas. No pueden ver la sonrisa de un ser querido y sentir alegría, o grabar la mueca de un extraño en las sombras y temblar de miedo.
Esta, más que nada en nuestra lista, podría ser lo que separa al hombre de la máquina. ¿Cómo se puede enseñar a un robot a enamorarse? ¿Cómo puedes programar la frustración, asco, ¿asombro o lástima? ¿Vale la pena intentarlo?
Algunos científicos creen que sí. Creen que los robots del futuro integrarán ambos sistemas de emociones cognitivas, y eso, como resultado, podrán funcionar mejor aprende más rápido e interactúa más eficazmente con los humanos. Por extraño que parezca, Ya existen prototipos que expresan una gama limitada de emociones humanas. Nao, un robot desarrollado por un equipo de investigación europeo, tiene las cualidades afectivas de un niño de 1 año. Puede mostrar felicidad enfado, miedo y orgullo, todo combinando posturas con gestos. Estas acciones de visualización, derivado de estudios de chimpancés y bebés humanos, están programados en Nao, pero el robot decide qué emoción mostrar basándose en su interacción con personas y objetos cercanos. En los próximos años, robots como Nao probablemente funcionarán en una variedad de entornos:hospitales, hogares y escuelas, en las que podrán ayudar y escuchar con simpatía.
El robot de "Lost in Space" (la serie de televisión de la década de 1960, no la horrible película de 1998) vagaba por mi imaginación mientras escribía este artículo. Era difícil escribir sobre humanos interactuando con máquinas y no escuchar la advertencia icónica del Robot:"Peligro, Will Robinson, peligro! "- resonando en mis pensamientos.