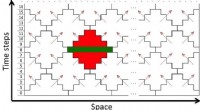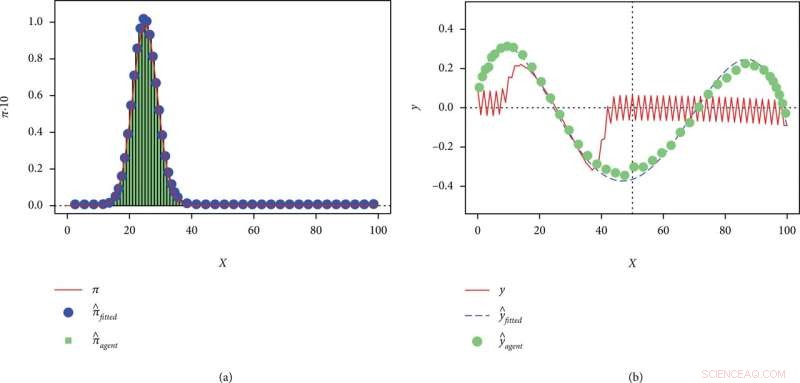
Resultados para el escenario unimodal. Ilustración del método de diseño y comparación con simulaciones multiagente para el escenario unimodal:(a) representa la distribución estacionaria y (b) el cambio esperado. Crédito:Informática inteligente (2022). DOI:10.34133/2022/9761694
Las algas florecen, los pájaros se congregan y los insectos pululan. Este comportamiento en masa por parte de los organismos individuales puede proporcionar un bien separado y colectivo, como mejorar las posibilidades de una propagación de apareamiento exitosa o proporcionar seguridad. Ahora, los investigadores han aprovechado las habilidades de autoorganización necesarias para aprovechar los beneficios de los enjambres naturales para aplicaciones robóticas en inteligencia artificial, computación, búsqueda y rescate, y mucho más.
Publicaron su método el 3 de agosto en Intelligent Computing .
"Diseñar un conjunto de reglas que, una vez ejecutado por un enjambre de robots, resulte en un comportamiento deseado específico es particularmente desafiante", dijo el autor correspondiente Marco Dorigo, profesor en el laboratorio de inteligencia artificial, llamado IRIDIA, de la Université Libre de Bruxelles, Bélgica. "El comportamiento del enjambre no es un mapa uno a uno con reglas simples ejecutadas por robots individuales, sino el resultado de interacciones complejas de muchos robots que ejecutan el mismo conjunto de reglas".
En otras palabras, los robots deben trabajar juntos para lograr el objetivo total de contribuciones discretas. El problema, según Dorigo y sus coautores, el Dr. Valentini y el Prof. Hamann, es que el diseño convencional de unidades individuales para lograr un objetivo colectivo es de abajo hacia arriba, lo que requiere refinamientos de prueba y error que pueden ser costosos.
"Para enfrentar este desafío, proponemos un enfoque de diseño novedoso de global a local", dijo Dorigo. "Nuestra idea clave es componer un enjambre heterogéneo utilizando grupos de agentes con diferentes comportamientos, de modo que el comportamiento del enjambre resultante se aproxime a una entrada del usuario que represente el comportamiento de todo el enjambre".
Esta composición implica seleccionar agentes individuales con comportamientos predeterminados que los investigadores saben que trabajarán juntos para lograr el comportamiento colectivo objetivo. Pierden la capacidad de programar localmente unidades individuales, pero según Valentini, Hamann y Dorigo, la compensación vale la pena. Señalaron el ejemplo de una tarea de vigilancia, donde un enjambre puede necesitar monitorear una instalación que requiere más monitoreo interno durante el día y más monitoreo externo durante la noche.
"El usuario proporciona una descripción de las asignaciones de enjambre deseadas como una distribución de probabilidad sobre el espacio de todas las posibles asignaciones de enjambre:más agentes adentro durante el día, más afuera durante la noche o viceversa", dijo Valentini.
El usuario definiría el comportamiento del objetivo cambiando el número y la posición de los modos de distribución, con cada modo correspondiente a una asignación específica, como 80 % de agentes adentro, 20 % afuera durante el día y 30 % adentro, 70 % afuera durante la noche. Esto permite que el enjambre cambie el comportamiento de forma periódica y autónoma, predeterminado por los modos establecidos, a medida que cambian las circunstancias.
"Si bien es difícil encontrar las reglas de control exactas para los robots para que el enjambre se comporte como deseamos, se puede obtener un comportamiento de enjambre deseado al combinar diferentes conjuntos de reglas de control que ya entendemos", dijo Dorigo. "Los comportamientos de enjambre se pueden diseñar macroscópicamente mezclando robots de diferentes conjuntos de reglas predefinidas".
Esta no es la primera vez que Dorigo recurre a la naturaleza para mejorar los enfoques informáticos. Anteriormente, desarrolló el algoritmo de optimización de colonias de hormigas, basado en cómo las hormigas navegan entre sus colonias y fuentes de alimento, para resolver problemas informáticos difíciles que implican encontrar una buena aproximación de una ruta óptima en un gráfico.
Si bien Dorigo propuso por primera vez este enfoque para un problema relativamente simple, desde entonces ha evolucionado como un medio para abordar una variedad de problemas. Dorigo dijo que planea llevar la metodología de enjambre en una dirección similar.
"Nuestro siguiente paso inmediato es demostrar la validez de nuestra metodología en un conjunto más amplio de comportamientos de enjambre y avanzar más allá de la asignación de tareas", dijo Dorigo. "Nuestro objetivo final es comprender qué hace que esto sea posible, formalizar una teoría genérica que permita a los investigadores e ingenieros diseñar comportamientos de enjambre sin pasar por el minucioso proceso de prueba y error". Menos comunicación entre robots les permite tomar mejores decisiones