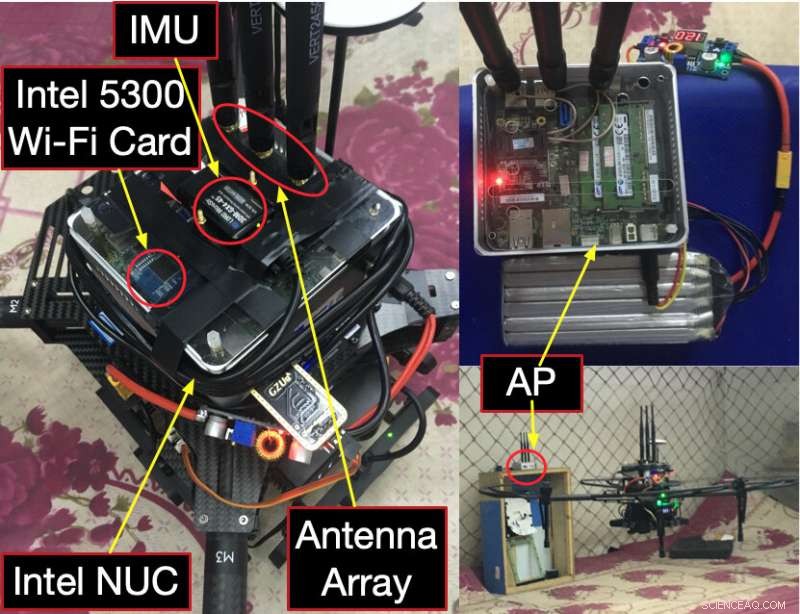
Crédito:Zhang, Wang y Jiang.
Los micro vehículos aéreos (MAV) podrían tener numerosas aplicaciones útiles, por ejemplo, ayudar a los humanos a completar inventarios de almacenes o misiones de búsqueda y rescate. Si bien muchas empresas en todo el mundo ya han comenzado a producir y utilizar MAV, algunos de estos robots voladores todavía tienen limitaciones considerables.
Para trabajar de la manera más eficaz, Los MAV deben estar respaldados por un sistema de estimación de pose eficiente. Este es un sistema o método que puede calcular la posición y actitud de un dron, que luego se puede utilizar para controlar su vuelo, ajustar su velocidad y ayudar a su navegación mientras está funcionando de forma autónoma y cuando se controla de forma remota.
Investigadores de la Universidad de Ciencia y Tecnología de Huazhong en China han desarrollado recientemente un nuevo sistema para la estimación de pose de MAV en ambientes interiores. Su nuevo enfoque, esbozado en un artículo prepublicado en arXIv y que se publicará en Transacciones IEEE sobre electrónica industrial , aprovecha la infraestructura WiFi existente para permitir una navegación más eficaz en drones pequeños y ágiles.
"En nuestro trabajo anterior, probamos la viabilidad de utilizar la capacidad de localización de WiFi para corregir la deriva del sensor inercial integrado (IMU), "Shengkai Zhang, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Sin embargo, la técnica que desarrollamos, apodado CWISE, solo funciona en espacios abiertos y sin desvanecimiento por trayectos múltiples. En nuestro estudio actual, impulsamos este método aún más para abordar el problema de las trayectorias múltiples en entornos interiores y hacer que nuestro sistema propuesto sea más práctico ".
El objetivo principal del nuevo estudio llevado a cabo por Zhang y sus colegas fue utilizar la infraestructura WiFi fácilmente disponible para estimar las poses de 6-DoF de MAV. En contraste con las técnicas de estimación de pose existentes basadas en visión por computadora, el sistema que desarrollaron está libre de limitaciones visuales, lo que significa que funciona bien bajo diferentes condiciones ambientales y de iluminación.
En lugar de analizar los estímulos visuales recopilados por sensores, el sistema aprovecha las numerosas subportadoras de señales de multiplexación por división de frecuencia ortogonal (OFDM) WiFi. Más específicamente, utiliza estas señales para encontrar el ángulo de llegada (AoA) de la ruta directa entre un MAV y un punto de acceso WiFi entre las muchas reflexiones de la señal en ambientes interiores.
El sistema creado por Zhang y sus colegas tiene dos componentes principales:un algoritmo de estimación de AoA y un modelo de fusión de sensor inercial WiFi. El algoritmo de estimación de AoA es un método computacional que estima las actitudes MAV y desenreda el AoA para el posicionamiento. El modelo de fusión de sensor inercial WiFi, por otra parte, combina el AoA estimado y los datos recopilados mediante sensores inerciales para optimizar las poses de un dron.
"Es bien sabido que los ángulos se pueden utilizar para localizar un objetivo mediante triangulación, sin embargo, sin escala métrica, "Dijo Zhang." Por otro lado, la IMU de un MAV proporciona poses métricas pero sufre de desviación temporal. Fusionamos WiFi AoAs y mediciones inerciales y tomamos lo mejor de ambos mundos ".
El sistema desarrollado por Zhang y sus colegas tiene numerosas ventajas sobre las técnicas de estimación de pose más convencionales. Primero, es liviano y se puede implementar instantáneamente en cualquier ambiente interior cubierto por una red WiFi. Es más, Funciona bien en espacios de trabajo con diferentes condiciones de iluminación y textura.
El estudio destaca el potencial del uso de conexiones WiFi para mejorar las estrategias de detección y navegación en robots. Cuando se prueba en una serie de experimentos en ambientes interiores, el nuevo sistema de estimación de pose logró resultados notables, presentando un error de posición medio de 61,7cm y un error de actitud de 0,92 grados. En el futuro, podría usarse para mejorar la navegación MAV en los almacenes, oficinas u otros ambientes interiores.
"En la actualidad, la precisión de nuestro estimador de pose de inercia WiFi está en el nivel de decímetros, ", Dijo Zhang." Nos gustaría mejorar eso. Mientras tanto, El WiFi en sí tiene algunas limitaciones, p.ej., bloqueo de la estructura, interferencia, etcétera. Creemos que acoplar correctamente la detección visual y la detección inalámbrica lograría una estimación de pose más robusta y precisa, lo que da como resultado robots autónomos más prácticos ".
© 2020 Science X Network