Crédito:Tan et al.
Los robots auto reconfigurables (SRR) que pueden cambiar de forma automáticamente y adaptarse a su entorno circundante han atraído recientemente mucho interés dentro de la comunidad de investigación robótica. Estos robots podrían tener varias aplicaciones útiles, ya que pueden adquirir un alto nivel de autonomía en la detección de su entorno, así como en la planificación y realización de las acciones adecuadas. Si bien estudios anteriores han introducido métodos para clasificar estos robots en subgrupos, todavía no existe un procedimiento estándar para evaluar su desempeño.
Teniendo esto en cuenta, Investigadores de la Universidad Sun Yat-sen en China y la Universidad de Tecnología y Diseño de Singapur han desarrollado recientemente un marco para la taxonomía y evaluación (TAEV) de robots autoconfigurables. Su estudio, presentado en Acceso IEEE , fue financiado por la Oficina del Programa Nacional de Investigación y Desarrollo de Robótica de Singapur.
"Hasta aquí, Los investigadores han ideado un enfoque cualitativo para clasificar los SRR, pero no métodos cuantitativos que puedan guiar al diseñador, fabricante y usuario del robot, "Abdullah Aamir Hayat, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Esto nos motivó a desarrollar un marco y un método de evaluación para los SRR".
En SRR, la capacidad de cambiar de forma para completar una tarea determinada depende principalmente del tipo de mecanismos empleados por los robots y su nivel de autonomía. Si bien algunos sistemas SRR son completamente autónomos, otros requieren cierto grado de teleoperación manual.
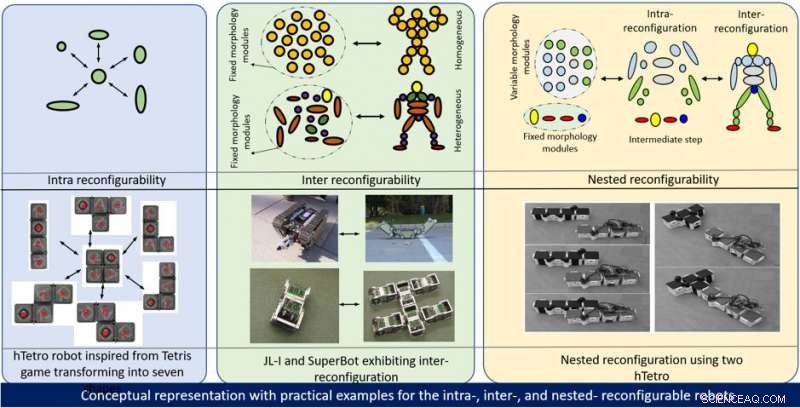
A nivel mecánico, los robots se pueden clasificar en tres categorías principales:aquellos con un intra-, enterrar-, y reconfiguración anidada. La diferencia entre intra e interconfiguraciones radica en el número de configuraciones disponibles para el robot y la escala de estas configuraciones.
La distinción entre intra e inter-reconfigurabilidad es que la primera involucra un solo módulo robótico que puede cambiar su morfología sin ningún montaje o desmontaje y la segunda implica dos o más módulos que se pueden montar o desmontar. La integración de inter e intra produce la reconfigurabilidad anidada. Crédito:Tan et al.
La intra-reconfigurabilidad implica un solo módulo robótico que puede cambiar su morfología sin ningún montaje o desmontaje, mientras que la interconfigurabilidad involucra dos o más módulos que se pueden ensamblar o desensamblar. Finalmente, reconfiguración anidada, acuñado por el profesor Mohan Rajesh Elara y la profesora Kristin L.Wood, combina características de las reconfiguraciones intra e interconfiguraciones.
En su papel Hayat y sus colegas introdujeron métricas que se pueden usar para evaluar los SRR, cuantificando su nivel de autonomía y el número de configuraciones a su disposición. Estas métricas se combinaron para crear un marco TAEV que podría guiar a los investigadores y fabricantes en la evaluación de sus sistemas robóticos.
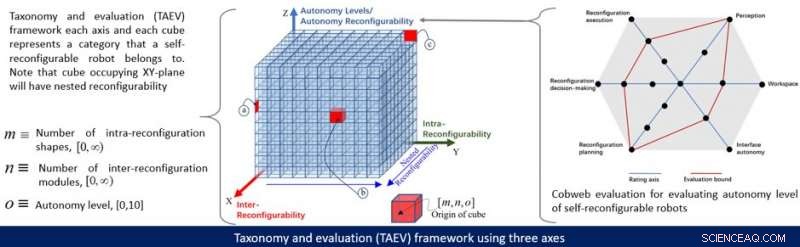
"Nuestro trabajo cuantifica la reconfigurabilidad del mecanismo asignando un índice sobre la base de una serie de morfología de significado y la cantidad de módulos involucrados, "Hayat explicó." Estos índices están representados en los dos ejes (X- e Y-) en el marco de tres ejes. Al tercer eje (Z-) se le asigna el índice dado por el nivel de autonomía que se calcula utilizando el modelo de evaluación de telaraña que consta de seis indicadores de desempeño, a saber, la planificación de la reconfiguración, Toma de decisiones, autonomía de la interfaz, percepción, y espacio de trabajo ".
La principal ventaja del marco desarrollado por Hayat y sus colegas es que asigna un índice único a un SRR dado dentro del espacio de taxonomía 3-D que describieron en su artículo. Como resultado, se podría utilizar para diseñar estudios de compensación e idear enfoques para evaluar o comparar el desempeño de diferentes SRR en la misma tarea.
"El marco genérico que presentamos se puede aplicar a numerosos SRR existentes, permitiendo que se clasifiquen no solo cualitativamente en función de su tamaño, locomoción, etc. pero también cuantitativamente, incorporando el mecanismo y la autonomía de los robots, "Dijo Hayat.
En el futuro, este marco para TAEV podría ayudar a evaluar los SRR de manera más efectiva, al mismo tiempo que identifica sus limitaciones y características que podrían mejorarse. Tanto los investigadores como los fabricantes podrían usarlo para comparar el rendimiento de diferentes robots en las mismas tareas o para evaluar diferentes versiones del mismo robot. En su papel Hayat y sus colegas también discuten otras aplicaciones potenciales para el nuevo marco, utilizando robots existentes como ejemplos.
"Nuestros hallazgos sugieren que existe un tremendo potencial para que los diseños de robots novedosos con autonomía ocupen el espacio tridimensional y que las arquitecturas reconfigurables anidadas podrían tener muchas aplicaciones prácticas". "Dijo Hayat." Con esto en mente, nuestro grupo está trabajando en la implementación de nuevos intra-, enterrar-, y arquitecturas robóticas reconfigurables anidadas para realizar tareas de mantenimiento, es decir, limpieza y vigilancia autónomas ".
© 2020 Science X Network