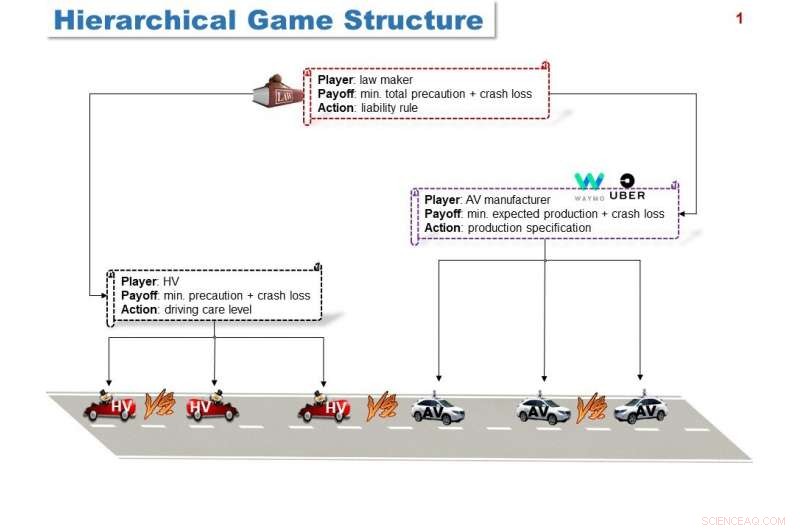
Estructura jerárquica del juego, ilustrar las interacciones estratégicas jerárquicas de tres capas entre el legislador, el fabricante de AV, AV, y HV en carreteras. Cada jugador tiene objetivos distintos o incluso contradictorios, con el objetivo de seleccionar una estrategia para optimizar sus objetivos. Crédito:Sharon Di y Xu Chen / Columbia Engineering
Una decisión reciente de la Junta Nacional de Seguridad de la Transpiración (NTSB) sobre el accidente de Uber en marzo de 2018 que mató a un peatón en Arizona dividió la culpa entre Uber, el vehículo autónomo de la empresa (AV), el conductor de seguridad en el vehículo, la víctima, y el estado de Arizona. Con la llegada de los coches autónomos, Los hallazgos de la NTSB plantean una serie de preguntas sobre la incertidumbre en el sistema de responsabilidad legal actual. En un accidente que involucre a un conductor AV y un conductor humano, quien es responsable Si ambos son responsables, ¿Cómo se debe repartir la pérdida por accidente entre ellos?
Los vehículos autónomos apartan a las personas de la tarea práctica de conducir y, por lo tanto, representan un desafío complejo para la ley actual de responsabilidad civil por accidentes. que castiga principalmente a los humanos. Los expertos legales anticipan que, mediante la programación de algoritmos de conducción, fabricantes de automóviles autónomos, incluidos los diseñadores de automóviles, proveedores de sensores, desarrolladores de software, productores de automóviles, y partes relacionadas que contribuyen al diseño, fabricación, y probando, tendrá una influencia directa en el tráfico. Si bien estos algoritmos hacen que los fabricantes sean actores indispensables, con la responsabilidad de su producto potencialmente jugando un papel crítico, Los responsables de la formulación de políticas aún no han ideado un método cuantitativo para asignar la pérdida entre el automóvil autónomo y el conductor humano.
Para abordar este problema, Los investigadores de Columbia Engineering y Columbia Law School han desarrollado una regla de responsabilidad conjunta basada en fallas que se puede utilizar para regular tanto a los fabricantes de automóviles autónomos como a los conductores humanos. Proponen un modelo de teoría de juegos que describe las interacciones estratégicas entre el legislador, el fabricante de automóviles autónomos, El automovil autonomo, y conductores humanos, y examinar cómo, a medida que aumenta la penetración de los vehículos autónomos en el mercado, la regla de responsabilidad debería evolucionar.
Sus hallazgos se describen en un nuevo estudio que Sharon Di presentará el 14 de enero, profesor asistente de ingeniería civil y mecánica de ingeniería, y Eric Talley, Isidor y Catedrático Sevilla Sulzbacher de Derecho, en la 99a Reunión Anual de la Junta de Investigación del Transporte en Washington, CORRIENTE CONTINUA
Si bien la mayoría de los estudios actuales se han centrado en diseñar algoritmos de conducción de vehículos autónomos en varios escenarios para garantizar la eficiencia y la seguridad del tráfico, no han explorado la adaptación del comportamiento de los conductores humanos a los vehículos autónomos. Di y Talley se preguntaron sobre el efecto de "riesgo moral" en los humanos, ya sea con la exposición a más y más encuentros de tráfico con AV, las personas podrían estar menos inclinadas a ejercer el "debido cuidado" cuando se enfrentan a vehículos autónomos en la carretera y conducir de una manera más arriesgada.
"Los conductores humanos perciben los vehículos autónomos como agentes inteligentes con la capacidad de adaptarse a conductas de conducción humana más agresivas y potencialmente peligrosas, "dice Di, quien es miembro del Data Science Institute de Columbia. "Descubrimos que los conductores humanos pueden aprovechar esta tecnología si conducen de manera descuidada y corren más riesgos, porque saben que los coches autónomos se diseñarían para conducir de forma más conservadora ".
El equipo descubrió que una póliza de responsabilidad diseñada de manera óptima es fundamental para ayudar a evitar que los conductores humanos desarrollen riesgo moral y para ayudar al fabricante de AV con una compensación entre la seguridad del tráfico y los costos de producción. Crédito:Sharon Di y Xu Chen / Columbia Engineering
Los investigadores utilizaron la teoría de juegos para modelar un mundo con jugadores que interactúan y que intentan seleccionar sus propias acciones para optimizar sus propios objetivos. Los jugadores, legisladores, Fabricantes de AV, AV, y conductores humanos:tienen diferentes objetivos en el ecosistema del transporte. Los legisladores quieren regular el tráfico con mayor eficiencia y seguridad, los fabricantes de automóviles autónomos tienen un objetivo de lucro, y tanto los vehículos autónomos como los conductores humanos interactúan en las vías públicas y buscan seleccionar las mejores estrategias de conducción. Para capturar la interacción compleja entre todos los jugadores, los investigadores aplicaron métodos de teoría de juegos para ver en qué estrategia se decanta cada jugador, para que otros no se aprovechen de sus decisiones.
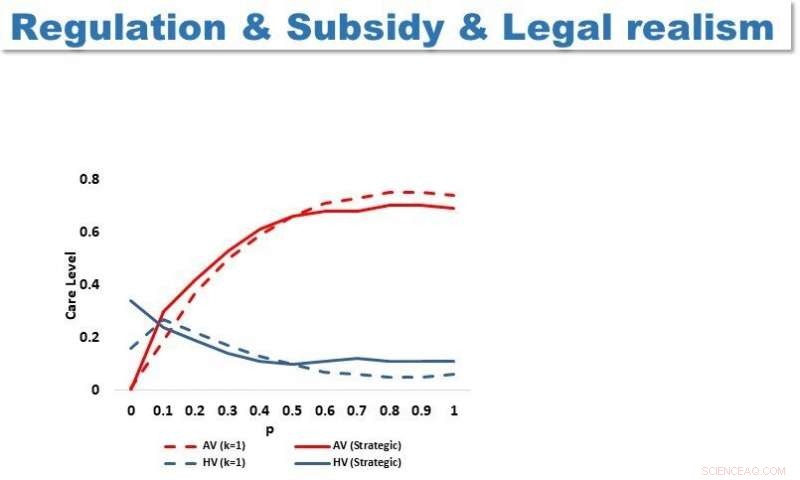
El juego jerárquico ayudó al equipo a comprender el riesgo moral de los conductores humanos (cuánto riesgo podrían decidir asumir los conductores), el impacto del fabricante de AV en la seguridad del tráfico, y la adaptación del legislador al nuevo ecosistema de transporte. Probaron el juego y su algoritmo en un conjunto de ejemplos numéricos, ofrece información sobre la evolución del comportamiento de los AV y los HV a medida que aumenta la tasa de penetración del AV y varían los parámetros de costo o ambientales.
El equipo descubrió que una póliza de responsabilidad diseñada de manera óptima es fundamental para ayudar a evitar que los conductores humanos desarrollen riesgo moral y para ayudar al fabricante de AV con una compensación entre la seguridad del tráfico y los costos de producción. Los subsidios gubernamentales a los fabricantes de AV para la reducción de los costos de producción alentarían enormemente a los fabricantes a producir AV que superen sustancialmente a los conductores humanos y mejoren la seguridad y la eficiencia del tráfico en general. Es más, si los fabricantes de AV no están regulados en términos de especificaciones de tecnología AV o no están debidamente subvencionados, Los fabricantes de AV tienden a ser puramente lucrativos y destructivos para el sistema de tráfico en general.
"La trágica fatalidad en Arizona que involucró a un automóvil autónomo suscitó una enorme atención del público y de los legisladores sobre cómo trazar las líneas de responsabilidad legal cuando los vehículos autónomos interactúan con conductores humanos, ciclistas, y peatones, Talley agrega. "La aparición de los vehículos autónomos introduce un tipo de incertidumbre particularmente espinoso en el status quo, y uno que retroalimente sobre la fabricación y el diseño AV. La responsabilidad legal por accidentes entre automóviles y peatones generalmente implica un cálculo complejo de evaluaciones comparativas de fallas para cada uno de los grupos mencionados anteriormente. La introducción de un vehículo autónomo puede complicar aún más las cosas al agregar otras partes a la mezcla, como los fabricantes de hardware y programadores de software. Y la cobertura de seguros distorsiona aún más las cosas al incluir a terceros interesados. Esperamos que nuestras herramientas analíticas ayuden a los responsables de la formulación de políticas AV con sus decisiones normativas. y al hacerlo, ayudará a mitigar la incertidumbre en el entorno regulatorio existente en torno a las tecnologías AV ".
Di y Talley ahora están buscando múltiples fabricantes de AV que se dirigen a diferentes mercados globales con diferentes especificaciones tecnológicas, haciendo aún más complejo el desarrollo de las normas legales.
"Sabemos que los conductores humanos correrán más riesgos y desarrollarán un riesgo moral si creen que su entorno vial se ha vuelto más seguro, Dijo que "está claro que un diseño óptimo de la regla de responsabilidad es crucial para mejorar el bienestar social y la seguridad vial con tecnologías de transporte avanzadas".