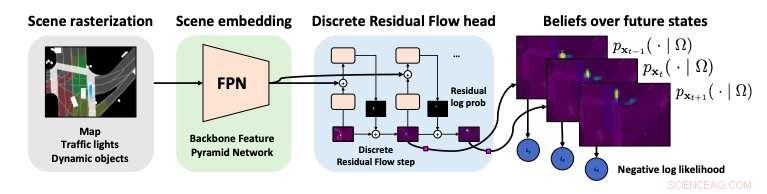
Descripción general de la red de flujo residual discreto. Crédito:Jain et al.
En los próximos años, Los vehículos autónomos podrían convertirse gradualmente en un medio de transporte popular. Antes de que esto pueda suceder, sin embargo, Los investigadores deberán desarrollar herramientas que garanticen que estos vehículos sean seguros y puedan navegar de manera eficiente en entornos poblados por humanos.
Dado que los vehículos autónomos están diseñados en última instancia para sortear obstáculos tanto estáticos como móviles, deben poder detectar objetos rápidamente y evitarlos. Una forma de lograrlo podría ser desarrollar modelos que puedan predecir el comportamiento futuro de objetos o personas en la calle. para estimar dónde se ubicarán cuando el vehículo se acerque a ellos.
Predecir cambios futuros en entornos urbanos, sin embargo, puede ser muy desafiante. Es especialmente difícil cuando se trata de predecir el comportamiento humano, como los movimientos o acciones inesperadas de los peatones.
El año pasado, uno de los autos autónomos de Uber mató a Elaine Herzberg, una mujer de 49 años, en Arizona. Este accidente junto con decenas de personas más, provocó un gran debate sobre la seguridad de los vehículos autónomos, así como sobre si estos vehículos deben probarse en entornos poblados.
Hace aproximadamente una semana, Nuevos documentos publicados por la Junta Nacional de Seguridad del Transporte de EE. UU. (NTSB) revelaron que el vehículo autónomo de Uber involucrado en el accidente fatal del año pasado no identificó a Herzberg como peatón hasta que fue demasiado tarde. Los mismos informes sugieren que el vehículo autónomo involucrado en el accidente nunca fue entrenado para detectar peatones en cualquier lugar fuera de un paso de peatones.
Herzberg estaba cruzando la calle imprudentemente en el momento del accidente, por lo que las fallas de software reveladas por el informe de la NTSB explicarían por qué el vehículo autónomo de Uber no la detectó, que finalmente causó su muerte. Los nuevos análisis publicados por NTSB podrían detener el programa de vehículos autónomos de la compañía, que había comenzado a probar nuevamente en diciembre de 2018 después de haber estado en espera durante varios meses.
Estos nuevos hallazgos destacan la necesidad de desarrollar una inteligencia artificial más avanzada y un software más confiable antes de que los vehículos autónomos puedan probarse en carreteras reales. Curiosamente, algunos días antes de que la NTSB publicara estos documentos, un artículo de investigadores del Grupo de Tecnologías Avanzadas de Uber, la Universidad de Toronto y UC Berkeley se publicó previamente en arXiv, introduciendo una nueva técnica para predecir el comportamiento de los peatones llamada red de flujo residual discreto (DRF-NET). Según los investigadores, esta red neuronal puede hacer predicciones sobre el comportamiento futuro de los peatones mientras captura la incertidumbre inherente al pronosticar el movimiento de largo alcance.
"Nuestra red aprendida captura de manera efectiva los posteriores multimodales sobre el movimiento humano futuro al predecir y actualizar una distribución discretizada en ubicaciones espaciales, "escribieron los investigadores en su artículo.
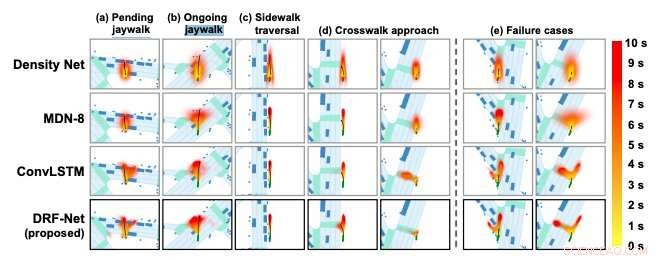
Una de las cifras del artículo reciente que muestra las predicciones de peatones del modelo. Crédito:Jain et al.
Los investigadores expresaron creencias sobre las posiciones futuras de los peatones a través de distribuciones categóricas que representan el espacio. Luego utilizaron estas distribuciones para planificar y optimizar rutas para vehículos autónomos, que tienen en cuenta las posiciones esperadas de los peatones.
Primeramente, la red DTF-NET introducida en su documento rasteriza imágenes de mapas de carreteras, lo que significa que los convierte en una imagen compuesta por píxeles discretos. Los comportamientos de los peatones se codifican así en una imagen rasterizada a vista de pájaro, que está alineado con un mapa semántico detallado.
Después, la red extrae características que son particularmente útiles para predecir el comportamiento de los peatones a partir de las imágenes rasterizadas. Finalmente, los investigadores entrenaron su modelo para predecir el comportamiento futuro de los peatones en la carretera basándose en estas características.
Entrenaron y evaluaron su red neuronal utilizando un conjunto de datos a gran escala que compilaron previamente, que contiene grabaciones del mundo real con anotaciones de objetos y pistas basadas en detección en línea, recopilados en varias ciudades de América del Norte. Estas grabaciones incluyen trayectorias de peatones que fueron anotadas manualmente por los investigadores en 360 grados, Vista de alcance de 120 metros usando un sensor LiDAR en el vehículo.
En las evaluaciones realizadas por los investigadores, la técnica DTF-NET funcionó bien, superando a varios otros métodos de referencia para predecir el comportamiento de los peatones. Por lo tanto, este método podría ayudar a mejorar el rendimiento de los vehículos autónomos de Uber, permitiéndoles anticipar los movimientos de los peatones y planificar sus caminos en consecuencia.
"The strong performance of DRF-NET's discrete predictions is very promising for cost-based and constrained robotic planning, "escribieron los investigadores.
Curiosamente, the pedestrian behaviors processed and predicted by the DTF-NET network, highlighted in one of the recent paper's figures, include 'pending jaywalk, ' 'ongoing jaywalk' and 'sidewalk traversal, ' as well as crosswalk. This seems somewhat ironic, as among other things, the recent documents released by NTSB highlighted the inability of Uber's self-driving vehicle to detect jaywalking pedestrians at the time of the crash in Arizona.
Only time will tell whether the DRF-NET network or other techniques will actually be able to improve the ability of self-driving vehicles to detect pedestrians. Siendo por el momento, sin embargo, one thing seems clear:Significant advancements in AI and better techniques for detecting pedestrians will be necessary before self-driving vehicles can be safely put on the road.
© 2019 Science X Network