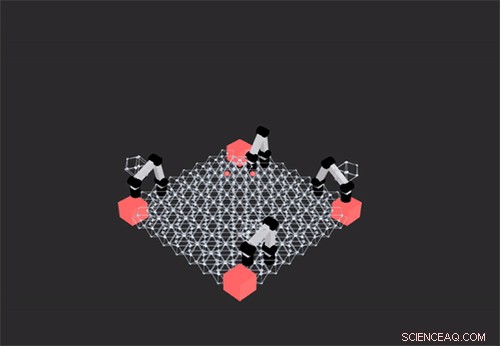
La simulación por computadora muestra un grupo de cuatro robots ensambladores trabajando en la construcción de una estructura tridimensional. Se podrían desatar enjambres enteros de tales robots para crear grandes estructuras como alas de aviones o hábitats espaciales. Crédito:Instituto de Tecnología de Massachusetts
Los aviones comerciales de hoy se fabrican normalmente en secciones, a menudo en diferentes ubicaciones:alas en una fábrica, secciones de fuselaje en otra, los componentes de la cola en otro lugar, y luego volaron a una planta central en enormes aviones de carga para el ensamblaje final.
Pero, ¿y si la asamblea final fuera la única asamblea, con todo el avión construido a partir de una gran variedad de diminutas piezas idénticas, ¿Todo armado por un ejército de diminutos robots?
Esa es la visión que el estudiante de posgrado Benjamin Jenett, trabajando con el profesor Neil Gershenfeld en el Centro de Bits y Átomos (CBA) del MIT, ha venido realizando como su trabajo de tesis doctoral. Ahora se ha llegado al punto en que las versiones prototipo de dichos robots pueden ensamblar estructuras pequeñas e incluso trabajar en equipo para construir ensamblajes más grandes.
El nuevo trabajo aparece en la edición de octubre de IEEE Robotics and Automation Letters, en un artículo de Jenett, Gershenfeld, compañera de estudios de posgrado Amira Abdel-Rahman, y el ex alumno de la CBA Kenneth Cheung SM '07, Doctor. '12, que ahora está en el Centro de Investigación Ames de la NASA, donde lidera el proyecto ARMADAS para diseñar una base lunar que podría construirse con ensamblaje robótico.
"Este artículo es un placer, "dice Aaron Becker, profesor asociado de ingeniería eléctrica e informática en la Universidad de Houston, que no estaba asociado con este trabajo. "Combina un diseño mecánico de primer nivel con demostraciones asombrosas, nuevo hardware robótico, y una suite de simulación con más de 100, 000 elementos, " él dice.
Crédito:Instituto de Tecnología de Massachusetts
"Lo que está en el corazón de esto es un nuevo tipo de robótica, que llamamos robots relativos, ", Dice Gershenfeld. Históricamente, el explica, ha habido dos categorías amplias de robótica:las fabricadas con costosos componentes personalizados que están cuidadosamente optimizados para aplicaciones particulares, como el ensamblaje en fábrica, y los hechos de módulos económicos producidos en serie con un rendimiento mucho menor. Los nuevos robots sin embargo, son una alternativa a ambos. Son mucho más simples que los anteriores, aunque mucho más capaz que este último, y tienen el potencial de revolucionar la producción de sistemas a gran escala, desde aviones hasta puentes y edificios enteros.
Según Gershenfeld, la diferencia clave radica en la relación entre el dispositivo robótico y los materiales que está manejando y manipulando. Con estos nuevos tipos de robots, "no se puede separar el robot de la estructura:funcionan juntos como un sistema, ", dice. Por ejemplo, mientras que la mayoría de los robots móviles requieren sistemas de navegación de alta precisión para realizar un seguimiento de su posición, los nuevos robots ensambladores solo necesitan realizar un seguimiento de dónde se encuentran en relación con las subunidades pequeñas, llamados voxels, en el que están trabajando actualmente. Cada vez que el robot da un paso hacia el siguiente vóxel, reajusta su sentido de posición, siempre en relación con los componentes específicos sobre los que se encuentra en ese momento.
La visión subyacente es que así como las imágenes más complejas se pueden reproducir usando una matriz de píxeles en una pantalla, prácticamente cualquier objeto físico se puede recrear como una serie de piezas tridimensionales más pequeñas, o voxels, que a su vez pueden estar formados por simples puntales y nodos. El equipo ha demostrado que estos componentes simples se pueden organizar para distribuir las cargas de manera eficiente; se componen en gran parte de espacio abierto, de modo que se minimiza el peso total de la estructura. Las unidades pueden ser recogidas y colocadas una al lado de la otra por los simples ensambladores, y luego se unen mediante sistemas de cierre integrados en cada vóxel.
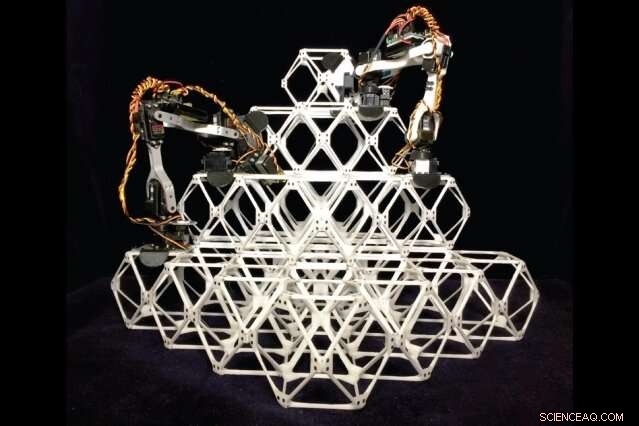
La foto muestra dos prototipos de robots ensambladores en el trabajo armando una serie de pequeñas unidades, conocidos como voxels, en una estructura más grande. Crédito:Benjamin Jenett
Los propios robots se asemejan a un brazo pequeño, con dos segmentos largos que se articulan en el medio, y dispositivos para sujetar las estructuras de vóxeles en cada extremo. Los dispositivos simples se mueven como gusanos de pulgada, avanzando a lo largo de una fila de vóxeles abriendo y cerrando repetidamente sus cuerpos en forma de V para pasar de uno a otro. Jenett ha apodado a los pequeños robots BILL-E (un guiño al robot de la película WALL-E), que son las siglas de Bipedal Isotropic Lattice Locomoting Explorer.
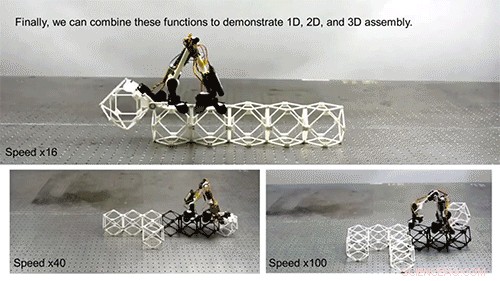
Jenett ha construido varias versiones de los ensambladores como diseños de prueba de concepto, junto con los correspondientes diseños de vóxeles con mecanismos de enganche para unir o separar fácilmente cada uno de sus vecinos. Ha utilizado estos prototipos para demostrar el ensamblaje de los bloques en lineal, bidimensional, y estructuras tridimensionales. "No estamos poniendo la precisión en el robot; la precisión proviene de la estructura" a medida que toma forma gradualmente, Dice Jenett. "Eso es diferente de todos los demás robots. Solo necesita saber dónde está su próximo paso".
Mientras trabaja en el ensamblaje de las piezas, cada uno de los pequeños robots puede contar sus pasos sobre la estructura, dice Gershenfeld, quien es el director de CBA. Junto con la navegación, esto permite a los robots corregir errores en cada paso, eliminando la mayor parte de la complejidad de los sistemas robóticos típicos, él dice. "Falta la mayoría de los sistemas de control habituales, pero mientras no pierda un paso, sabe dónde está ". Para aplicaciones prácticas de montaje, enjambres de tales unidades podrían estar trabajando juntos para acelerar el proceso, gracias al software de control desarrollado por Abdel-Rahman que puede permitir a los robots coordinar su trabajo y evitar interponerse en el camino de los demás.
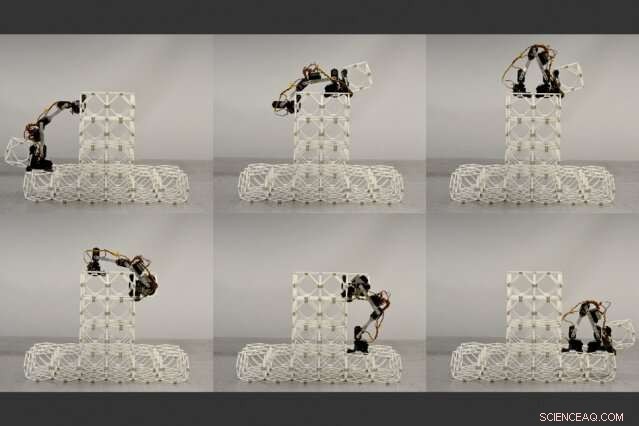
La secuencia de fotos muestra un robot ensamblador en funcionamiento, llevar una unidad estructural por encima y por el otro lado de una estructura en construcción. Crédito:Benjamin Jenett
Este tipo de ensamblaje de grandes estructuras a partir de subunidades idénticas utilizando un sistema robótico simple, como un niño que arma un gran castillo con bloques de LEGO, ya ha atraído el interés de algunos de los principales usuarios potenciales, incluida la NASA, Colaborador del MIT en esta investigación, y la empresa aeroespacial europea Airbus SE, que también ayudó a patrocinar el estudio.
Una ventaja de dicho montaje es que las reparaciones y el mantenimiento se pueden realizar fácilmente mediante el mismo tipo de proceso robótico que el montaje inicial. Las secciones dañadas se pueden desmontar de la estructura y reemplazar por otras nuevas, produciendo una estructura que es tan robusta como la original. "Desconstruir es tan importante como construir, "Gershenfeld dice:y este proceso también se puede utilizar para realizar modificaciones o mejoras en el sistema a lo largo del tiempo.
"Para una estación espacial o un hábitat lunar, estos robots vivirían en la estructura, manteniéndolo y reparándolo continuamente, "dice Jenett.
Por último, tales sistemas podrían usarse para construir edificios enteros, especialmente en entornos difíciles como en el espacio, o en la luna o en Marte, Dice Gershenfeld. Esto podría eliminar la necesidad de enviar grandes estructuras preensambladas desde la Tierra. En su lugar, podría ser posible enviar grandes lotes de subunidades diminutas, o formarlas a partir de materiales locales utilizando sistemas que podrían generar estas subunidades en su punto de destino final. "Si puedes hacer un jumbo jet, puedes hacer un edificio, "Dice Gershenfeld.
Sandor Fekete, director del Instituto de Sistemas Operativos y Redes de Computadoras de la Universidad Técnica de Braunschweig, en Alemania, que no estuvo involucrado en este trabajo, dice "Ultraligero, materiales digitales como [estos] abren perspectivas asombrosas para la construcción eficiente, complejo, estructuras a gran escala, que son de vital importancia en las aplicaciones aeroespaciales ".
Pero ensamblar tales sistemas es un desafío, dice Fekete, que planea unirse al equipo de investigación para un mayor desarrollo de los sistemas de control. "Aquí es donde el uso de robots pequeños y simples promete proporcionar el próximo avance:los robots no se cansan ni se aburren, y el uso de muchos robots en miniatura parece ser la única forma de realizar este trabajo crítico. Este trabajo extremadamente original e inteligente de Ben Jennet y sus colaboradores da un paso de gigante hacia la construcción de alas de avión dinámicamente ajustables. enormes velas solares o incluso hábitats espaciales reconfigurables ".
En el proceso, Gershenfeld dice:"Sentimos que estamos descubriendo un nuevo campo de sistemas híbridos de materiales y robots".
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.














