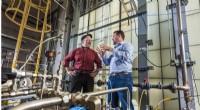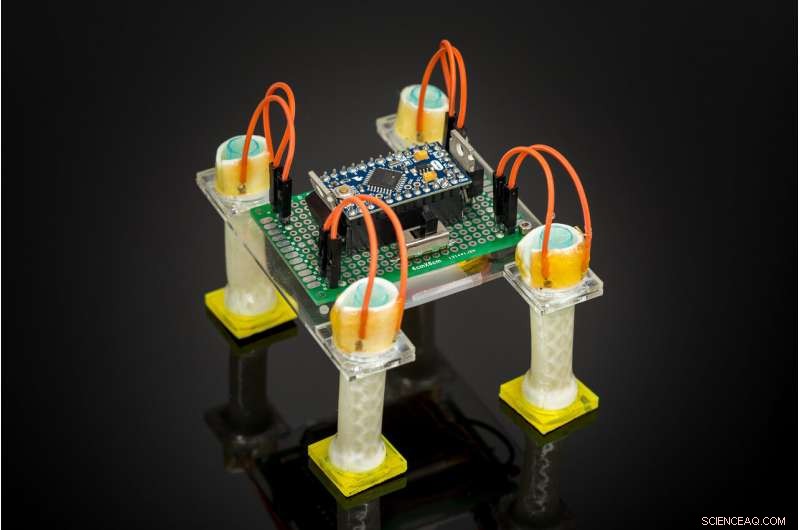
Controlado eléctricamente, robot blando sin ataduras construido con cuatro actuadores tubulares blandos, un microcontrolador y batería. El robot puede programarse para caminar o transportar un objeto. Crédito:David Baillot / UC San Diego Jacobs School of Engineering
Los ingenieros de la Universidad de California en San Diego han desarrollado una forma de construir robots blandos que son compactos, portátil y multifuncional. El avance fue posible gracias a la creación de actuadores tubulares cuyos movimientos se controlan eléctricamente, haciéndolos fáciles de integrar con pequeños componentes electrónicos.
Como prueba de concepto, Los ingenieros utilizaron estos nuevos actuadores para construir un Robot a batería que puede caminar sin ataduras sobre superficies planas y mover objetos. También construyeron una pinza suave que puede agarrar y levantar objetos pequeños.
El equipo, dirigido por el profesor de ingeniería mecánica y aeroespacial de UC San Diego, Shengqiang Cai, publicó el trabajo el 11 de octubre en Avances de la ciencia .
Un problema con la mayoría de los actuadores blandos es que vienen con configuraciones voluminosas. Esto se debe a que sus movimientos se controlan bombeando aire o fluidos a través de cámaras internas. Por lo tanto, construir robots con este tipo de actuadores requeriría atarlos a bombas, grandes fuentes de energía y otros equipos especializados.
En el estudio actual, Los ingenieros de UC San Diego crearon actuadores suaves que se controlan con electricidad. "Esta característica hace que nuestros actuadores tubulares sean compatibles con la mayoría de los dispositivos electrónicos y baterías disponibles comercialmente, "Dijo Cai.
Los actuadores están hechos de un tipo de material utilizado para músculos artificiales en robots, llamados elastómeros de cristal líquido. Están compuestos por moléculas de cristal líquido incrustadas en una red de polímero elástico. Lo especial de estos materiales es que cambian de forma, moverse y contraerse en respuesta a estímulos como el calor o la electricidad, similar a cómo los músculos se contraen en respuesta a las señales de las células nerviosas.
Para construir cada actuador, Los ingenieros colocaron tres cables calefactores entre dos películas delgadas de elastómero de cristal líquido. Luego, el material se enrolla en un tubo, preestirado y expuesto a la luz ultravioleta.
Cada cable calefactor se puede controlar de forma independiente para hacer que el tubo se doble en seis direcciones diferentes. Cuando una corriente eléctrica pasa a través de uno o dos de los cables, calienta parte del tubo y hace que se doble en la dirección de esos cables. Cuando se envía una corriente a través de los tres cables, todo el tubo se contrae, acortamiento de longitud. Cuando se apaga la electricidad, el tubo se enfría lentamente y vuelve a su forma original.

Controlado eléctricamente, robot blando sin ataduras construido con cuatro actuadores tubulares blandos, un microcontrolador y batería. El robot puede programarse para caminar o transportar un objeto. Crédito:David Baillot / UC San Diego Jacobs School of Engineering
"El uso de un potencial eléctrico aplicado externamente facilita la programación de la posición de cada actuador tubular, "dijo el primer autor Qiguang He, un doctorado en ingeniería mecánica y aeroespacial. estudiante de la Escuela de Ingeniería Jacobs de UC San Diego.
La combinación de varios actuadores permitió a los ingenieros construir diferentes tipos de robots blandos. Construyeron un sin ataduras robot andante que utiliza cuatro actuadores como patas. Este robot funciona con una pequeña batería de litio / polímero a bordo. También construyeron una pinza blanda usando tres actuadores como dedos.
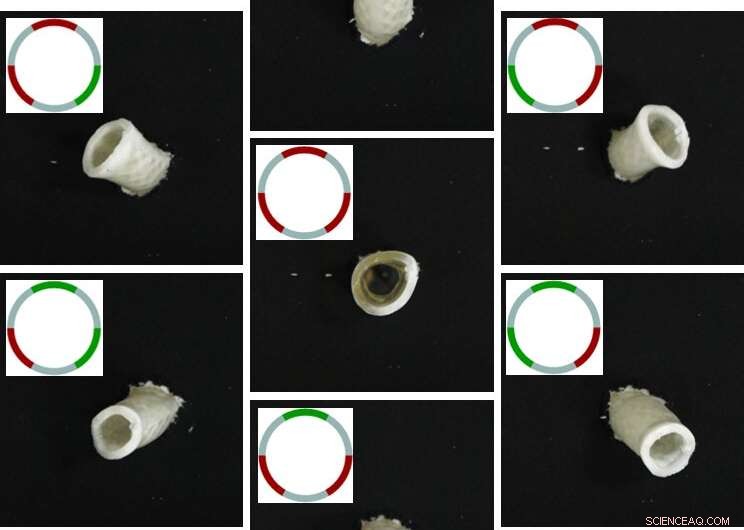
Dependiendo de los cables calefactores que se activen eléctricamente (rojo), el actuador tubular blando puede doblarse en seis direcciones diferentes (imágenes externas) y contraerse en longitud (imagen central). Crédito:Qiguang He
Cada robot tiene un microcontrolador a bordo en el que los ingenieros programaron una secuencia de movimientos controlados eléctricamente para los actuadores. Esto permite que los robots se muevan de forma independiente.
El equipo ahora está trabajando para fabricar actuadores suaves que puedan moverse más rápido. Los actuadores actuales tardan unos 30 segundos en doblarse y contraerse completamente, y hasta cuatro minutos para volver a sus formas originales. Esto se debe a que el material tarda un poco en calentarse y enfriarse por completo. El objetivo final es hacer actuadores que puedan contraerse y relajarse tan rápido como los músculos humanos. Él dijo.