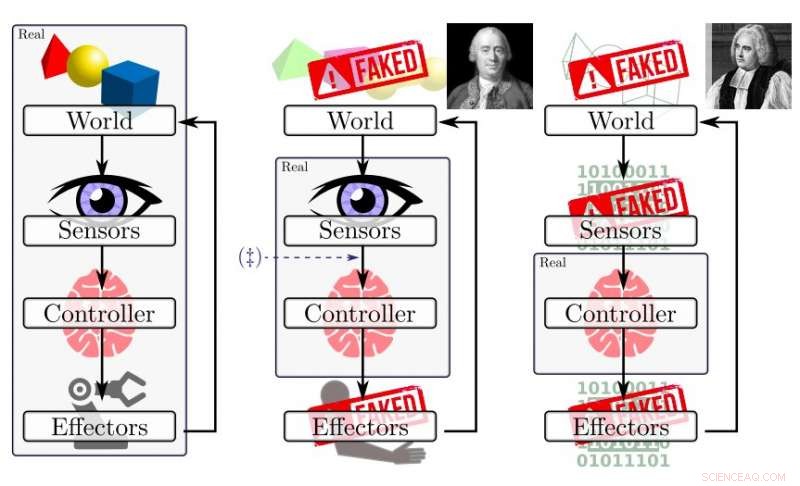
Una ilustración de diferentes modos de falsificación emparejados con posiciones intelectuales apropiadas:la visión ortodoxa (izquierda) y dos formas de escepticismo filosófico (centro y derecha). La columna de la izquierda representa un experimento de robot físico de extremo a extremo en el que cada parte es real. La columna del medio, con el busto de David Hume, Se trata de sensores reales, pero también motivos para dudar de la veracidad del mundo que informan. La columna de la derecha, encabezada por el obispo Berkeley, tiene un controlador real, pero todos los demás elementos son mero software; representa un experimento de robot realizado en simulación (para el uso común de ese término) donde la información se inyecta directamente en la corteza del robot. La columna de Hume es el caso estudiado en el artículo:los robots perciben un mundo mediado por sensores que están conectados a tierra en el mundo real, pero es un mundo de "nada más que sofismas e ilusiones". Crédito:Shell &O’Kane.
Evaluar el rendimiento de los algoritmos y controladores robóticos, los investigadores suelen utilizar simulaciones de software o robots físicos reales. Si bien estos pueden aparecer como dos estrategias de evaluación distintas, Hay toda otra gama de posibilidades que combinan elementos de ambos.
En un estudio reciente, Investigadores de la Universidad de Texas A&M y la Universidad de Carolina del Sur se han propuesto examinar escenarios de evaluación y ejecución que se encuentran en una intersección entre simulaciones e implementaciones reales. Su investigación, descrito en un artículo publicado previamente en arXiv, se centra específicamente en instancias en las que robots reales perciben el mundo a través de sus sensores, donde el entorno que sienten podría verse como una mera ilusión.
"Consideramos los problemas en los que los robots conspiran para presentar una visión del mundo que difiere de la realidad, "Dylan Shell y Jason O'Kane, los investigadores que llevaron a cabo el estudio, escribió en su periódico. “La investigación está motivada por el problema de validar físicamente el comportamiento de los robots a pesar de que existe una discrepancia entre los robots que tenemos a mano y los que deseamos estudiar, o el entorno para las pruebas que está disponible frente al que se desea, u otros posibles desajustes en este sentido ".
El estudio se inspira en investigaciones biológicas anteriores, cuyo objetivo era comprender las limitaciones de percepción de los organismos vivos y cómo los desajustes de información pueden afectar su comportamiento. En años recientes, Los biólogos han comenzado a utilizar herramientas tecnológicas como la realidad virtual (VR) y la realidad aumentada (AR) para comprender mejor los organismos biológicos y sus percepciones.
Similar, Las simulaciones de software se han convertido en un componente clave de la investigación en robótica. con muchos investigadores usándolos para ejecutar y probar sus sistemas y enfoques robóticos. En la mayoría de estos casos, un software de simulación reproduce algunos elementos de la ejecución de un robot de forma virtual, en lugar de físico, medio ambiente, generar lecturas de sensores artificiales o datos relacionados con el estado.
Esto plantea otra pregunta:¿qué tan cerca un simulador, que es un sistema en sí mismo, reproducir realmente el mundo real? Teniendo esto en cuenta, los investigadores se propusieron explorar las relaciones entre pares de sistemas que "coinciden entre sí, "así como casos en los que uno de estos sistemas es lo suficientemente poderoso como para evocar una ilusión en el otro.
"Después de formular el concepto de una ilusión convincente, esencialmente una noción de simulación de sistemas que tiene lugar en el mundo real, Examinamos las implicaciones de este tipo de simulabilidad en términos de requisitos de infraestructura, "Shell y O'Kane explicaron en su artículo." El tiempo es un recurso importante:algunos robots pueden simular otros pero, quizás, sólo a una velocidad más lenta que en tiempo real ".
Shell y O'Kane sugieren que las diferentes velocidades a las que los sistemas pueden simular otros sistemas permiten a los investigadores describir sistemas simulados y simulados de forma relativa. Basado en esta suposición, desarrollaron algunos teoremas para delinear la relación entre un sistema de simulación y uno simulado, ofreciendo varios ejemplos para cada uno.
Después, los investigadores llevaron a cabo un sencillo experimento de varios robots basado en la teoría que desarrollaron. En este experimento, un robot tuvo que completar una simple tarea de navegación en un campo ilimitado de obstáculos, tanto en simulación como en un banco de pruebas de robot físico. Sus hallazgos sugieren que diferentes enfoques de simulación pueden tener eficiencias de tiempo marcadamente diferentes para producir una ilusión para un sistema dado.
Las observaciones recopiladas por Shell y O'Kane, así como la teoría que desarrollaron, podría ampliar la comprensión actual del software de simulación utilizado para evaluar enfoques robóticos, destacando nuevos aspectos de la relación entre sistemas simulados y simuladores. En su trabajo futuro, podrían explorar una variedad de nuevas direcciones de investigación, por ejemplo, ampliar su teoría para abordar las nociones de incertidumbre y no determinismo o desarrollar una teoría más rica de ilusiones eficientes.
© 2019 Science X Network