Crédito:Li et al.
En años recientes, un número creciente de investigadores ha explorado el uso de brazos robóticos o manos diestras para resolver una variedad de tareas cotidianas. Si bien muchos de ellos han abordado con éxito tareas simples, como agarre o manipulación básica, Hasta ahora, las tareas complejas que implican múltiples pasos y movimientos precisos / estratégicos han resultado más difíciles de abordar.
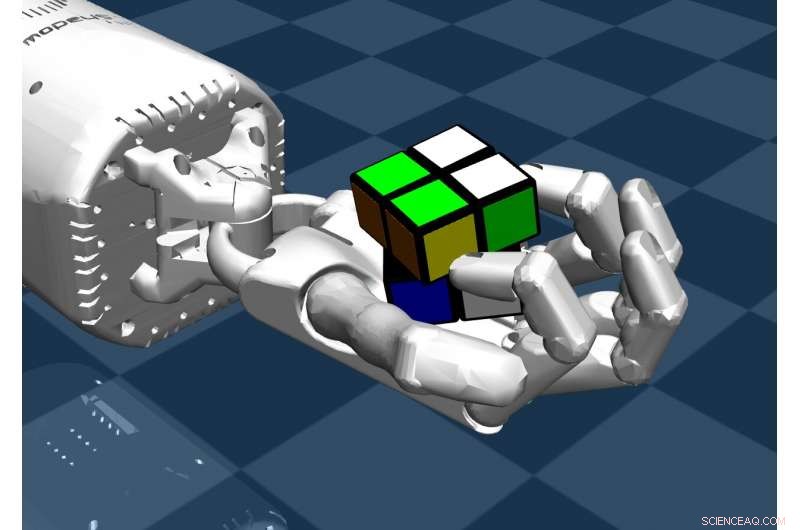
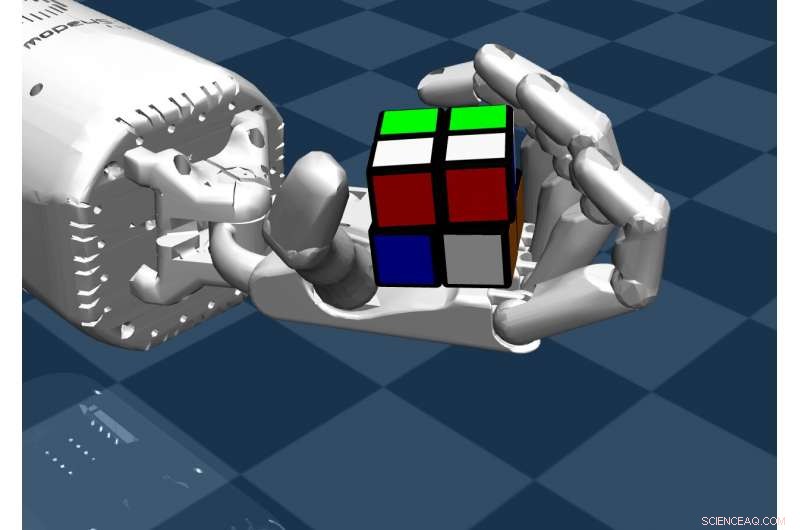
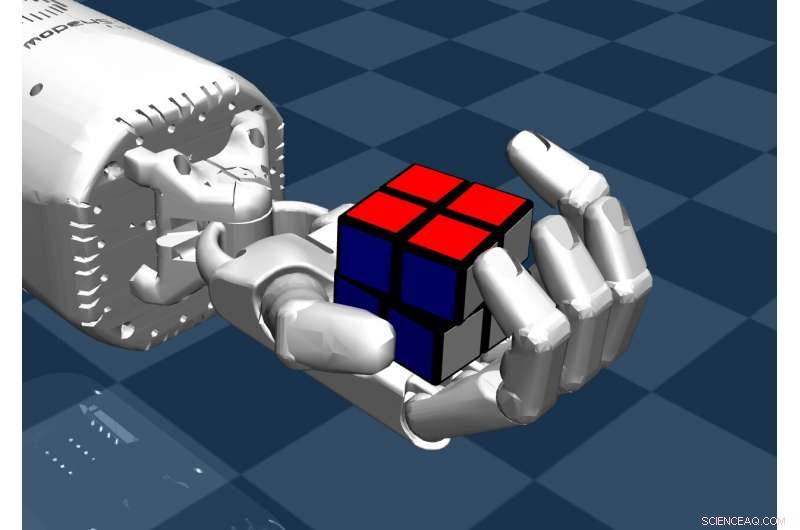
Un equipo de investigadores de la Universidad China de Hong Kong y Tencent AI Lab ha desarrollado recientemente un enfoque basado en el aprendizaje profundo para resolver un cubo de Rubik con una mano diestra de varios dedos. Su enfoque presentado en un artículo publicado previamente en arXiv, permite que una mano diestra resuelva tareas de manipulación más avanzadas, como el famoso rompecabezas del cubo de Rubik.
Un cubo de Rubik es un cubo de plástico cubierto de cuadrados multicolores que se pueden cambiar a diferentes posiciones. El objetivo del rompecabezas es girar y girar estratégicamente las secciones del cubo hasta que todos los cuadrados de cada una de sus caras sean del mismo color.
"Al ver que algunos investigadores usan manos de robot con múltiples dedos para tareas como reposicionar un objeto y manipular una herramienta, consideramos si podríamos utilizar una mano de robot para tareas más complicadas, como resolver un cubo de Rubik, "Tingguang Li, uno de los investigadores que realizó el estudio, dijo a TechXplore.
Para abordar el rompecabezas del cubo de Rubik con una mano diestra, Li y sus colegas desarrollaron un modelo jerárquico de aprendizaje por refuerzo profundo que esencialmente separa la tarea en una etapa de planificación y otra de manipulación. En su estudio, los investigadores aplicaron este enfoque a una diestra mano de cinco dedos llamada Shadow Hand.
"Los desafíos de resolver un cubo de Rubik con una mano robótica son dos:primero, controlar la mano de un robot es muy difícil ya que tiene un alto grado de libertad; segundo, resolver un cubo de Rubik requiere una secuencia de movimiento larga, "Li explicó." Nuestra idea combina un algoritmo de aprendizaje por refuerzo profundo, que tiene muchas aplicaciones exitosas, y conocimiento humano. El objetivo es mostrar la destreza de la mano de un robot y resolver un cubo de Rubik revuelto aleatoriamente con una alta tasa de éxito.
El modelo jerárquico propuesto por los investigadores tiene dos componentes clave:uno para la planificación y otro para la manipulación. Inicialmente, el componente de planificación (es decir, un solucionador de cubos basado en modelos) identifica la secuencia de modo óptima para resolver el rompecabezas. Luego, el controlador de manipulación (es decir, un operador de cubo sin modelo) controla los dedos de la mano diestra para ejecutar estos pasos.
"Nuestro enfoque tiene dos capas:la capa superior planifica una trayectoria para resolver un cubo de Rubik que se compone de acciones atómicas, y la capa inferior aprende a implementar cada acción atómica, "Li dijo." Las acciones atómicas se aprenden a través del modelo de aprendizaje de refuerzo profundo, deshacerse del diseño manual de complicados controladores de bajo nivel ".
Los investigadores entrenaron y evaluaron su modelo utilizando un simulador de alta fidelidad, que también construyeron. Probaron el rendimiento de su modelo en una serie de experimentos en los que la diestra mano virtual fue alimentada con 1400 cubos de Rubik revueltos aleatoriamente y encontraron que logró una tasa de éxito promedio del 90,3 por ciento.
"Demostramos que la mano del robot de múltiples dedos tiene un enorme potencial para tareas complicadas, "Dijo Li." La integración de algoritmos basados en el aprendizaje puede ayudar a reducir el trabajo pesado de diseñar manualmente algoritmos de control. Espero que esto atraiga a más investigadores a esta área y los anime a desarrollar nuevos enfoques para aumentar aún más la destreza de las manos de los robots ".
Crédito:Li et al.

Crédito:Li et al.
Crédito:Li et al.
En contraste con los enfoques propuestos anteriormente, el modelo desarrollado por Li y sus colegas permite completar una tarea de manipulación más compleja con una mano diestra, específicamente resolviendo un cubo de Rubik. Hasta aquí, los investigadores solo han evaluado su enfoque en simulaciones, pero ahora planean aplicar su algoritmo en una mano robótica real.
© 2019 Science X Network