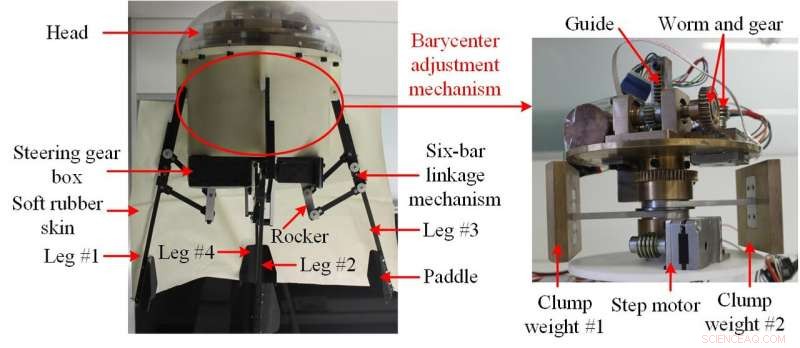
El diseño mecánico de la medusa robótica. Crédito:© Science China Press
Como fuente de inspiración, criaturas acuáticas como peces, cetáceos, y las medusas podrían inspirar diseños innovadores para mejorar las formas en que los sistemas artificiales operan e interactúan con los ambientes acuáticos. Las medusas en la naturaleza se impulsan a través de su entorno expandiendo y contrayendo radialmente sus cuerpos en forma de campana para empujar el agua detrás de ellas. que se llama propulsión a chorro.
Contrariamente a la opinión predominante de que las medusas se describen como nadadores ineficientes, Se ha demostrado que las medusas son uno de los nadadores más eficientes energéticamente. Es decir, Se ha demostrado que la natación similar a la de las medusas tendrá una ventaja de propulsión notable si se requiere una propulsión de baja energía. Por lo tanto, los movimientos de las medusas han atraído un interés significativo durante la última década en el contexto de los vehículos submarinos bioinspirados.
Recientemente, investigadores del Instituto de Automatización, Academia de Ciencias de China en Beijing, China desarrolló con éxito una novedosa medusa robótica capaz de realizar propulsión y maniobras tridimensionales similares a las de una medusa basada en un método basado en el aprendizaje por refuerzo.
Combinando los últimos avances en diseño mecatrónico, materiales electrónica, y métodos de control, Los investigadores están haciendo un esfuerzo integrado para desarrollar actuadores inteligentes para fabricar varias medusas robóticas. En general, estas medusas robóticas a menudo están atadas y son mucho más lentas en comparación con las que son accionadas por motores eléctricos convencionales. La mayoría de las medusas robóticas existentes no pueden ajustar libremente su actitud de tres ejes, que tiene un efecto adverso sobre la propulsión de natación libre y aplicaciones plausibles.
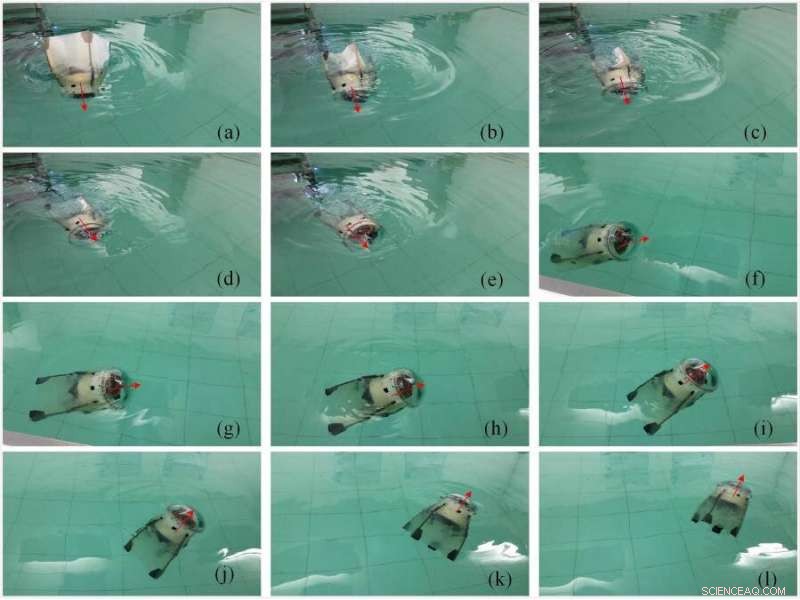
Instantáneas de medusas robóticas realizando un movimiento híbrido entrelazando la natación vertical y horizontal. Crédito:© Science China Press
Para resolver este problema, el grupo de investigación dirigido por el Prof. Junzhi Yu del Instituto de Automatización, Academia china de ciencias, ha investigado cómo se diseña y controla un sistema robótico similar a una medusa, impulsado por un motor bioinspirado, capaz de moverse en 3-D.
Las medusas robóticas diseñadas siguen el modelo de Aurelia aurita (comúnmente llamada medusa luna), que tiene un desplazamiento relativamente grande y es especialmente adecuado para su uso con gran capacidad de carga. Mide unos 138 mm de alto y pesa unos 8,2 kg. Como se ilustra en la Figura 1, la medusa robótica tiene forma hemisférica y consta de una cabeza rígida en forma de campana, una cavidad principal cilíndrica, cuatro mecanismos de varillaje separados de seis barras, y una piel de goma suave. Para mejorar la maniobrabilidad de la medusa robótica, Se introduce un mecanismo de ajuste del baricentro montado en el interior de la cavidad. Mediante el ajuste de dos pesos de grupos en dirección vertical u horizontal o en una combinación de los dos, se logra la regulación de la actitud.
"Es muy difícil establecer un modelo dinámico preciso para nadar como las medusas, ya que es muy no lineal, fuerte acoplamiento, y sistema variable en el tiempo, ", dijo el profesor Junzhi Yu." Incertidumbres paramétricas y perturbaciones externas en entornos acuáticos dinámicos, al mismo tiempo, causar dificultad para derivar leyes de control resolviendo el problema de la cinemática inversa. "Por lo tanto, Se propone un método de control de actitud de circuito cerrado basado en aprendizaje reforzado para las medusas robóticas, que puede resolver un problema de control de decisiones óptimo a través de la interacción directa con el medio ambiente, particularmente sin la necesidad de modelado dinámico.
Finalmente, la propuesta del método de control de actitudes basado en aprendizaje reforzado hace posible la regulación autónoma de actitudes. "En comparación con la mayoría de las otras medusas robóticas, el robot construido muestra un alto orden de flexibilidad de estructura y maniobrabilidad de guiñada, "Señala Yu. También hizo hincapié en que esta medusa robótica autopropulsada con movimiento 3-D tiene grandes implicaciones para el diseño bioinspirado del sistema de propulsión a chorro con gran agilidad.














