Crédito:Ashby et al.
Investigadores del Auckland Bioengineering Institute y Technische Universität Dresden han diseñado recientemente un nuevo tipo de robot inflable para la navegación espacial. Estos robots, presentado en un artículo publicado en SPIE Digital Library, fueron creados utilizando transductores de elastómero dieléctrico (DET), que son esencialmente condensadores eléctricos hechos de materiales suaves de goma.
"La tecnología espacial actual está limitada por su masa y volumen. Se necesitan miles de dólares para poner en órbita incluso un solo kilogramo, "Joseph Ashby, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Nuestra investigación tiene como objetivo reemplazar o aumentar la tecnología actual con reemplazos de materiales inteligentes más ligeros combinados con estructuras inflables".
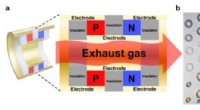
Si se integran con estructuras hinchables, Los DET podrían ayudar al desarrollo de robots blandos y de baja masa, que tienen una alta eficiencia de empaque y son fáciles de implementar. De hecho, Los DET se deforman cuando se les aplica voltaje, debido a la tensión de Maxwell generada por el campo eléctrico.
A diferencia de los motores eléctricos tradicionales, Estos condensadores permiten a los investigadores producir una amplia gama de movimientos y fuerzas sin complejos, mecanismos de engranajes pesados. Los DET también se pueden usar como sensores de deformación al monitorear sus cambios en la capacitancia a medida que se estiran. Esto significa que también tienen una ventaja auto-sensorial sin la necesidad de sistemas de monitoreo externos.
"Como están hechos completamente de materiales blandos, Las estructuras DET se pueden inflar de manera similar a un globo, "Ashby explicó." Esto significa que pueden formar grandes estructuras cuando se despliegan, pero se puede empaquetar en espacios pequeños de antemano, lo que los convierte en candidatos ideales para aplicaciones espaciales, donde las capacidades de lanzamiento tienen un volumen limitado ".
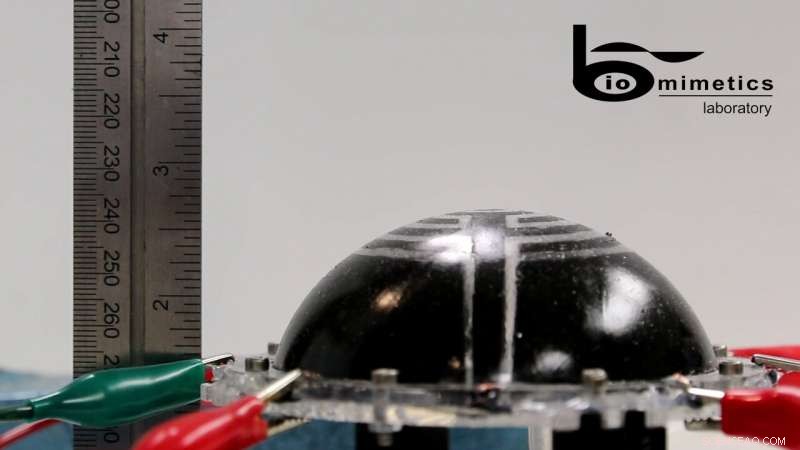
En su estudio, Ashby y sus colegas investigaron los movimientos logrados a partir de la actuación de tres diseños experimentales. En el primero de estos diseños, El actuador de la cúpula del robot está construido a partir de una lámina de caucho de silicona con electrodos segmentados.

Crédito:Ashby et al.
El segundo diseño es similar, pero con un alargamiento del actuador de la cúpula para producir un movimiento de locomotora a partir de la activación por fases de los segmentos. Finalmente, el tercero es un diseño cilíndrico enrollado con variaciones en la geometría de la costura, posición y composición del electrodo, lo que permitió a los investigadores lograr múltiples movimientos resonantes y no resonantes.
"A gran escala, al permitir el despliegue de grandes estructuras capaces de movimiento y / o monitoreo de la salud autoestructural desde poca masa, vehículos de lanzamiento de bajo volumen, podríamos ampliar nuestras capacidades de exploración espacial, "Ashby dijo." En un enfoque más estrecho, dar a los satélites más pequeños (de creciente popularidad) la oportunidad de desplegar y controlar antenas o conjuntos que de otro modo serían demasiado grandes para su tamaño, les proporcionaría unas instalaciones de comunicación y energía enormemente mejoradas ".
Ashby y sus colegas modelaron cada uno de sus diseños utilizando software FEM disponible comercialmente y luego los probaron en simulaciones a medida que se inflaban y actuaban. Aunque sus experimentos arrojaron resultados prometedores, los robots aún se encuentran en etapas muy tempranas de desarrollo.
Para que su tecnología se convierta en una alternativa viable a los actuadores espaciales actuales, los investigadores aún deben superar una serie de desafíos clave. Por ejemplo, El funcionamiento de DET en el espacio ha demostrado hasta ahora ser poco práctico debido a una serie de complejas condiciones ambientales.
"Ahora planeamos continuar desarrollando nuestros prototipos existentes, sino también explorar otros posibles diseños para una variedad de aplicaciones diferentes, Ashby dijo:"También estamos trabajando en el desarrollo de métodos de blindaje para proteger a nuestros robots del duro entorno espacial".
© 2019 Science X Network