Un equipo de investigadores del Instituto de Tecnología de Harbin en China y la Universidad Estatal de Michigan en los EE. UU. Ha desarrollado una forma de controlar los microrobots enjambres que pueden tomar múltiples tipos de formas. En su artículo publicado en la revista Ciencia Robótica , el grupo describe sus diminutos robots, que pueden hacer, y posibles usos para ellos.
Durante las últimas décadas, Los científicos e ingenieros han estado trabajando para desarrollar robots que sean tan pequeños que puedan nadar dentro de un cuerpo vivo. Se cree que algún día, Dichos robots podrán administrar medicamentos a objetivos en el cuerpo, o quizás quedarse en el cuerpo, trabajando en conjunto con el sistema inmunológico para prevenir enfermedades. En este nuevo esfuerzo, los investigadores han dado un paso más en esa dirección al desarrollar una forma de controlar un enjambre de pequeños robots que los configura en múltiples tipos de formas.
Los investigadores señalan que hasta ahora, Los ingenieros han desarrollado pequeños robots que se forman y operan en enjambres, pero sólo en una única forma, lo que limita su utilidad. Los investigadores que trabajan en China informan que sus diminutos robots pudieron tomar cuatro formas de enjambre diferentes:líquido, cinta, cadena y vórtice. Y cualquiera de ellos podría formarse a pedido.
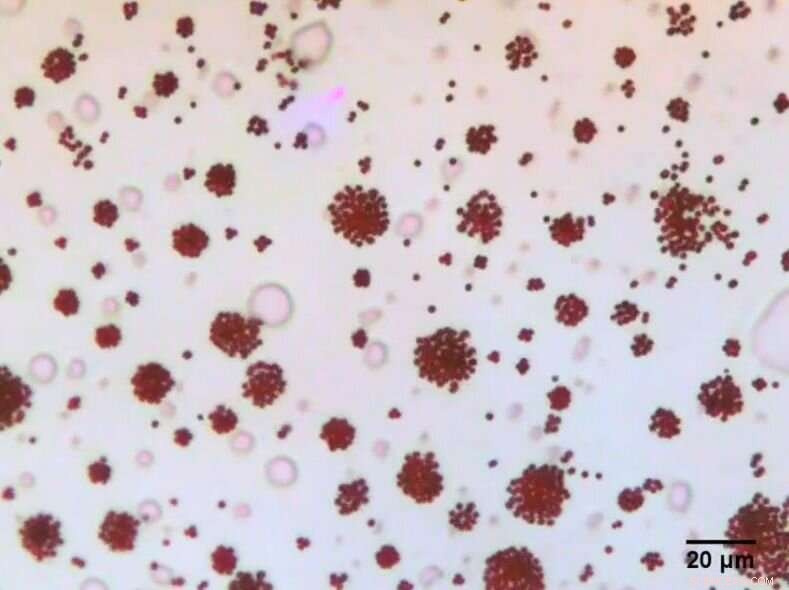
Los robots de los experimentos eran en realidad solo granos individuales de hematita:estaban suspendidos en un líquido y manipulados con imanes especializados. Controlando la frecuencia y la dirección del campo magnético, los investigadores pudieron hacer girar cada robot, rollo, oscilar y girar de forma independiente. Cuando se controló el campo magnético para todo un grupo de robots, el resultado fue un enjambre controlable.
Los investigadores señalan que para ir de una parte del cuerpo a otra, un enjambre tendría que poder configurarse a sí mismo en diferentes configuraciones. Moviéndose a través de un órgano como el estómago, por ejemplo, podría requerir un enjambre simplemente para moverse como una masa. Moviéndose a través de un canal por otra parte, requeriría formas como una cadena, serpiente o gusano. Y mover la carga dentro del cuerpo requeriría un enjambre para unirse en una forma como un vórtice para una bodega colectiva.
© 2019 Science X Network














