Investigadores de la Universidad de Washington han desarrollado un sistema robótico que puede alimentar a las personas que necesitan a alguien que las ayude a comer. Aquí, un voluntario demuestra cómo funciona el sistema. Crédito:Eric Johnson / Universidad de Washington
Aproximadamente 1 millón de adultos en los Estados Unidos necesitan que alguien los ayude a comer, según los datos del censo de 2010. Es una tarea que requiere mucho tiempo y, a menudo, es incómoda, uno hecho en gran parte por necesidad más que por elección.
Investigadores de la Universidad de Washington están trabajando en un sistema robótico que puede ayudar a hacerlo más fácil. Después de identificar diferentes alimentos en un plato, el robot puede diseñar estrategias sobre cómo usar un tenedor para recoger y entregar el bocado deseado a la boca de una persona.
El equipo publicó sus resultados en una serie de artículos:uno fue publicado recientemente en Cartas de automatización y robótica de IEEE , mientras que el otro se presentará el 13 de marzo en la Conferencia Internacional ACM / IEEE sobre Interacción Humano-Robot en Corea del Sur.
"Depender de un cuidador para que le dé cada bocado todos los días quita el sentido de independencia de una persona, "dijo el autor correspondiente Siddhartha Srinivasa, el profesor de Boeing en la Escuela de Ingeniería y Ciencias de la Computación Paul G. Allen de la Universidad de Washington. "Nuestro objetivo con este proyecto es dar a las personas un poco más de control sobre sus vidas".
La idea era desarrollar un sistema de alimentación autónomo que se adjuntara a las sillas de ruedas de las personas y les diera de comer lo que quisieran.
"Cuando comenzamos el proyecto, nos dimos cuenta de que hay muchas formas en que las personas pueden comer un trozo de comida en función de su tamaño, forma o consistencia. ¿Cómo empezamos? ", Dijo el coautor Tapomayukh Bhattacharjee, investigador asociado postdoctoral en la Allen School. "Así que preparamos un experimento para ver cómo los humanos comen alimentos comunes como uvas y zanahorias".
Los investigadores colocaron platos con alrededor de una docena de diferentes tipos de alimentos, que varían en consistencia desde zanahorias duras hasta plátanos blandos. Los platos también incluían alimentos como tomates y uvas, que tienen una piel dura y un interior suave. Luego, el equipo les dio un tenedor a los voluntarios y les pidió que recogieran diferentes piezas de comida y se las dieran a un maniquí. El tenedor contenía un sensor para medir cuánta fuerza usaban las personas cuando recogían alimentos.
Los voluntarios utilizaron varias estrategias para recoger alimentos con diferentes consistencias. Por ejemplo, la gente ensartaba elementos blandos como plátanos en ángulo para evitar que se resbalaran del tenedor. Para artículos como zanahorias y uvas, los voluntarios tendían a utilizar movimientos de meneo para aumentar la fuerza y lanzar cada bocado.
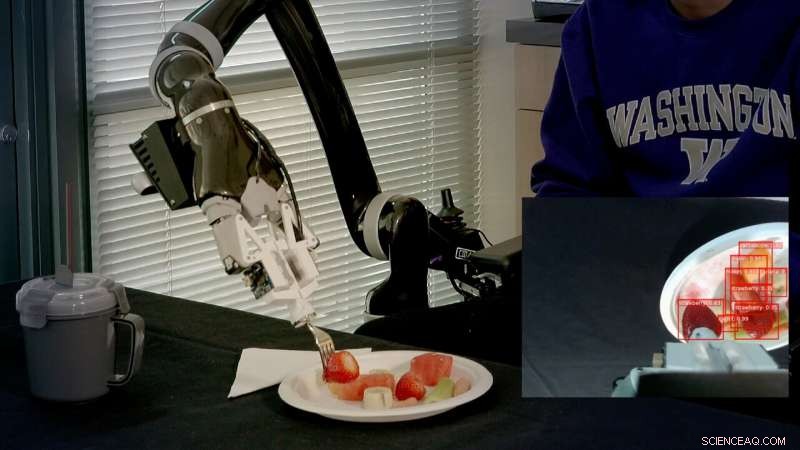
El algoritmo de detección de objetos llamado RetinaNet, escanea la placa, identifica los tipos de alimentos que contiene y coloca un marco alrededor de cada artículo. Crédito:Eric Johnson / Universidad de Washington
"La gente parecía utilizar diferentes estrategias no solo en función del tamaño y la forma de la comida, sino también de su dureza o blanda. Pero, ¿es realmente necesario hacer eso?" Dijo Bhattacharjee. "Decidimos hacer un experimento con el robot en el que lo hicimos ensartar comida hasta que el tenedor alcanzara una cierta profundidad en el interior, independientemente del tipo de comida ".
El robot usó la misma estrategia de fuerza y ensartado para tratar de recoger todos los trozos de comida, independientemente de su consistencia. Pudo recoger alimentos duros, pero tuvo problemas con los alimentos blandos y los de piel dura e interior blando. Entonces, robots como los humanos, necesitan ajustar la fuerza y el ángulo que utilizan para recoger diferentes tipos de alimentos.
El equipo también notó que los actos de recoger un trozo de comida y dárselo a alguien no son independientes entre sí. Los voluntarios a menudo orientaban específicamente un trozo de comida en el tenedor para que se pudiera comer fácilmente.
"Puedes coger un palito de zanahoria ensartándolo en el centro del palito, pero a una persona le costará comer, "Bhattacharjee dijo." Por otro lado, si lo levanta por uno de los extremos y luego inclina la zanahoria hacia la boca de alguien, es más fácil tomar un bocado ".
Diseñar una estrategia de ensacado y alimentación que cambie según el alimento, los investigadores combinaron dos algoritmos diferentes. Primero usaron un algoritmo de detección de objetos llamado RetinaNet, que escanea la placa, identifica los tipos de alimentos que contiene y coloca un marco alrededor de cada artículo.
Luego desarrollaron SPNet, un algoritmo que examina el tipo de comida en un marco específico y le dice al robot la mejor manera de recoger la comida. Por ejemplo, SPNet le dice al robot que ensarte una fresa o una rodaja de plátano en el medio, y clava zanahorias en uno de los dos extremos.
El equipo hizo que el robot recogiera trozos de comida y se los diera a los voluntarios utilizando SPNet o una estrategia más uniforme:un enfoque que ensartaba el centro de cada alimento independientemente de lo que fuera. Las diferentes estrategias de SPNet obtuvieron mejores resultados o se desempeñaron igual que el enfoque uniforme para todos los alimentos.
"Muchos desafíos de ingeniería no son exigentes con sus soluciones, pero esta investigación está íntimamente relacionada con las personas, ", Dijo Srinivasa." Si no tomamos en cuenta lo fácil que es para una persona tomar un bocado, entonces es posible que las personas no puedan usar nuestro sistema. Hay un universo de tipos de comida ahí fuera por lo que nuestro mayor desafío es desarrollar estrategias que puedan hacer frente a todos ellos ".
El equipo está trabajando actualmente con el Centro Taskar de Tecnología Accesible para obtener comentarios de los cuidadores y los pacientes en las instalaciones de vida asistida sobre cómo mejorar el sistema para que se adapte a las necesidades de las personas.
"En última instancia, nuestro objetivo es que nuestro robot ayude a las personas a almorzar o cenar por su cuenta, ", Dijo Srinivasa." Pero el punto no es reemplazar a los cuidadores:queremos empoderarlos ". Con un robot para ayudar el cuidador puede preparar el plato, y luego hacer otra cosa mientras la persona come ".