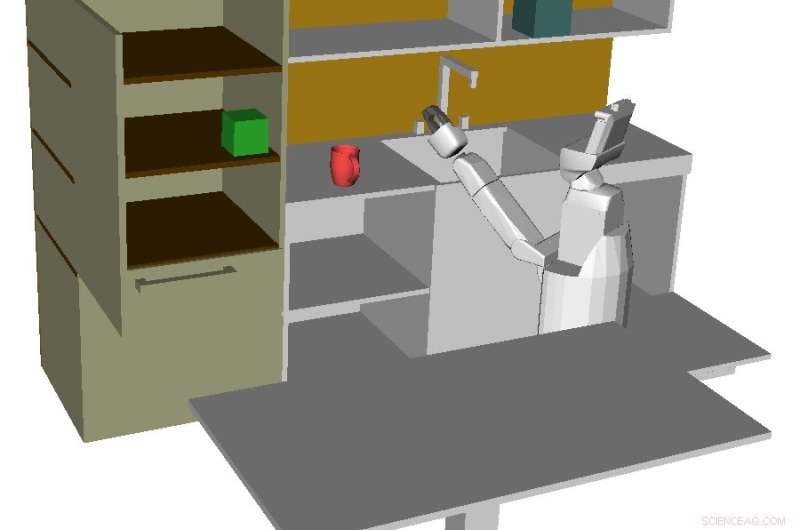
Entorno de simulación para un robot en el que los investigadores probaron su algoritmo. Crédito:Dai et al.
Investigadores del Laboratorio de Ciencias de la Computación e Inteligencia Artificial del MIT han desarrollado recientemente un sistema de planificación de movimiento restringido al azar que se puede aplicar a robots de alto grado de libertad (DOF) bajo incertidumbre de movimiento y en casos de información de estado imperfecta. Su enfoque descrito en un artículo publicado previamente en arXiv, puede encontrar trayectorias factibles que satisfagan un límite especificado por el usuario sobre la probabilidad de colisión.
"La principal inspiración de este trabajo es la limitación de los planificadores de movimiento con restricciones de azar existentes, "Siyu Dai, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Descubrí que muchos planificadores de movimiento de última generación requieren formular obstáculos en formas convexas, que es inviable para la planificación en dominios de alta dimensión, por ejemplo, planificación del movimiento del manipulador. Otros planificadores de movimiento convencionales limitados por el azar se basan en métodos de árbol aleatorio (RRT) de exploración rápida, de los cuales la velocidad en la tarea de planificación de altas dimensiones es muy preocupante ".
Para abordar las limitaciones de los sistemas de planificación de movimiento existentes, Dai y sus colegas se propusieron desarrollar un planificador de movimiento de reacción rápida y con limitaciones de azar. Un planificador de movimiento de este tipo sería particularmente útil para los robots que completan tareas que están sujetas a perturbaciones graves y observaciones limitadas. como la manipulación bajo el agua.
Chekov probabilista (p-Chekov), el sistema que crearon, se basa en su trabajo anterior en planificación de movimiento determinista, que integró la optimización de la trayectoria en un marco de hoja de ruta disperso. P-Chekov utiliza un enfoque de planificación de movimiento gaussiano lineal-cuadrático para estimar la distribución de probabilidad de estado de un robot. Luego aplica las teorías de cuadratura a las estimaciones de riesgo de colisión de waypoints y adapta los enfoques de asignación de riesgos para asignar probabilidades de falla permitidas a los waypoints.
"El sistema de planificación de movimiento restringido al azar desarrollado en nuestro documento incluye un componente de planificación determinista y un componente de evaluación de riesgos, "Dai explicó." El componente determinista primero construye una hoja de ruta que consiste en factibles, Bordes libres de colisiones basados en la información del entorno. En las tareas de planificación online, luego busca una trayectoria factible en la hoja de ruta y la suaviza con un optimizador de trayectoria. Esta trayectoria luego pasa al componente de evaluación de riesgos, que evalúa el riesgo de colisión en función de la estimación de ruidos ".
Entorno de simulación para un robot en el que los investigadores probaron su algoritmo. Crédito:Dai et al.
Si el riesgo de colisión calculado por el componente de evaluación de riesgos de P-Chekov viola la restricción de probabilidad predefinida, la trayectoria se devuelve al planificador determinista y se agregan nuevas restricciones, para encontrar una trayectoria con menor riesgo. Si el riesgo de colisión satisface la restricción de probabilidad, el sistema simplemente ejecuta la trayectoria propuesta.
A diferencia de los planificadores de movimiento conscientes de los riesgos existentes, P-Chekov se puede aplicar a tareas de planificación robótica de alta DOF, sin tener que formular obstáculos en formas convexas. En pruebas de simulación, el sistema redujo eficazmente los riesgos de colisión y satisfizo las limitaciones de probabilidad especificadas por el usuario en escenarios de planificación del mundo real que suelen encontrar los robots de gran dimensión.
"Establecimos un sistema de planificación de movimiento con restricción de azar que puede incorporar tareas de planificación de movimiento de alta dimensión, "Dijo Dai." Esto significa que la planificación de movimientos limitados por el azar ya no está restringida a las tareas de conducción, pero ahora se puede aplicar a robots móviles con brazos, por ejemplo, robots de apoyo humano y manipuladores submarinos, que puede hacer planes basados en diferentes requisitos de nivel de riesgo ".
En el futuro, P-Chekov podría aplicarse a una variedad de robots de alta dimensión, mejorando su planificación de movimiento en condiciones de incertidumbre. A pesar de sus prometedores resultados, los resultados de la fase de planificación del sistema a veces pueden ser demasiado conservadores, debido a asignaciones de riesgo subóptimas y un número limitado de nodos en cuadratura.
En pruebas preliminares, los investigadores ya han comenzado a evaluar técnicas que podrían mejorar la utilidad del sistema. Mientras tanto, también planean mejorar el algoritmo de estimación de probabilidad de colisión de P-Chekov, para impulsar aún más su capacidad para evitar conflictos.
"La dirección principal de nuestros próximos estudios será mejorar el algoritmo de evaluación de riesgos para acelerar todo el proceso de planificación del movimiento y hacer que el planificador reaccione rápidamente, "Dijo Dai.
© 2018 Science X Network