Aspecto de HRP-5P (izquierda) y HRP-5P con un aprox. Tabla de 13 kg (derecha). Crédito:Ciencia y tecnología industrial avanzada
Los investigadores han desarrollado un prototipo de robot humanoide, HRP-5P, destinado a realizar de forma autónoma trabajos pesados o trabajar en entornos peligrosos.
Como 182 cm, Robot humanoide de 101 kg, HRP-5P se construyó sobre tecnologías de la serie HRP incorporando nuevas tecnologías de hardware. Dentro de la serie, tiene capacidades físicas insuperables. Su inteligencia robótica comprende medición ambiental y reconocimiento de objetos, planificación y control del movimiento de todo el cuerpo, descripción de tareas y gestión de la ejecución, y tecnologías de sistematización altamente confiables. Alojar la inteligencia en este cuerpo ha permitido la instalación autónoma de placas de yeso por parte del robot, que es un ejemplo típico de trabajo pesado en los sitios de construcción. El uso de HRP-5P, como plataforma de desarrollo, en colaboración entre la industria y la academia, promete acelerar la I + D hacia la aplicación práctica de robots humanoides en sitios de construcción de edificios y en el montaje de grandes estructuras como aviones y barcos.
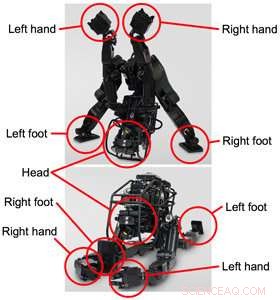
Figura 1. Inclinado hacia adelante (arriba) y con las piernas abiertas hacia adelante y hacia atrás (abajo). Crédito:Ciencia y tecnología industrial avanzada
Se espera que la disminución de la tasa de natalidad en Japón provoque una grave escasez de mano de obra en la construcción y muchas otras industrias. Es imperativo resolver este problema utilizando tecnologías robóticas. Estas tecnologías también brindan una alternativa convincente a tener trabajadores de la construcción en los sitios de construcción, instalaciones de aeronaves, o los astilleros realizan trabajos pesados que son potencialmente peligrosos. Sin embargo, Ha sido difícil hacer que estos sitios de construcción a gran escala sean adecuados para robots, lo que ha desalentado la introducción de robots. Debido a que los robots humanoides se parecen físicamente a las personas, pueden trabajar sin requerir cambios ambientales, posiblemente aliviar a los trabajadores del trabajo pesado.
En el desarrollo de la serie HRP, AIST ha colaborado con varias empresas del sector privado, incluyendo Kawada Industries Inc. (ahora Kawada Robotics Corp.), y ha desarrollado tecnologías básicas para su aplicación práctica. HRP-2 era capaz de caminar bípedo, acostada, de pie, caminando por senderos estrechos, y otras acciones. El HRP-3 podría caminar sobre superficies resbaladizas y apretar los pernos de los puentes por control remoto. La investigación de robots humanoides de respuesta a desastres en curso en AIST desde 2011 condujo a una versión revisada de HRP-2 con capacidades físicas mejoradas (como la longitud de las extremidades, Rango de movimiento, y salida conjunta), que podría caminar sobre terreno accidentado, girar las válvulas, y realizar otras tareas de forma semiautónoma sobre la base de la medición ambiental 3-D. Sin embargo, sus capacidades físicas aún eran insuficientes para trabajos pesados como la instalación de placas de yeso, y carecía de suficiente grado de libertad y suficiente rango de articulaciones móviles para emular el movimiento humano en entornos complejos. Hacia este final, AIST persiguió el desarrollo del robot humanoide, HRP-5P, con capacidades físicas que le permiten sustituir a las personas que realizan trabajos pesados.
Es más, HRP-5P hereda las tecnologías de la serie HRP y utiliza tecnología patentada de Honda Motor Co., Limitado.
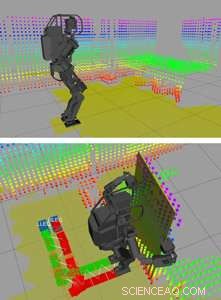
Figura 2. Mapa del área circundante (arriba) y plano de la marcha (abajo). Crédito:Ciencia y tecnología industrial avanzada
Una parte del desarrollo de HRP-5P fue apoyado por I + D encargado por la New Energy and Industrial Technology Development Organisation (NEDO), "I + D sobre sistemas de robots humanoides altamente fiables que pueden trabajar en entornos no estructurados" en "robots humanoides autónomos (campo de tecnologías de robot de elementos innovadores)" de "I + D sobre tecnologías de robots centrales de próxima generación, "y una subvención para la investigación científica de la Sociedad Japonesa para la Promoción de la Ciencia, "Orientación a la planificación del movimiento de cuerpo completo basada en la adquisición de un modelo ambiental que permite a los robots humanoides adaptarse a entornos desconocidos" (número de proyecto de investigación JP17H07391).
El prototipo de robot humanoide HRP-5P fue desarrollado con un cuerpo robusto e inteligencia avanzada para trabajar de forma autónoma y proporcionar una fuente alternativa de trabajo pesado.
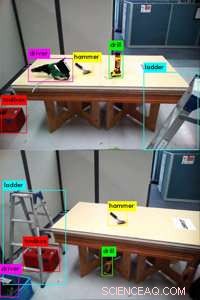
Figura 3. Ejemplo de detección de objetos. Crédito:Ciencia y tecnología industrial avanzada
La integración de estas tecnologías ha permitido la instalación autónoma de placas de yeso en las que HRP-5P maneja y transporta grandes, heavy objects at a simulated residential construction site independently.
Específicamente, this work involves the following series of operations.
R&D on robot intelligence will be promoted using this platform, targeting an alternative source of autonomous manual labor at residential or office building sites, and in assembly of large structures such as aircraft and ships. This will compensate for labor shortages, free people from heavy labor, and help them focus on more high-value-added work.
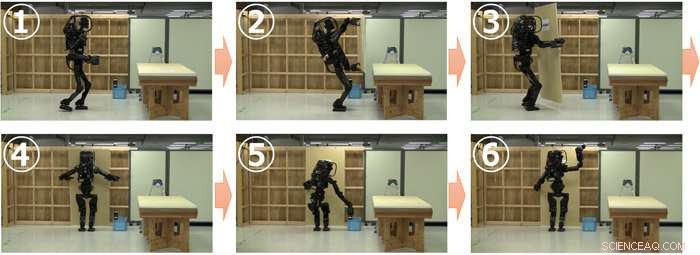
Figure 4. Autonomous gypsum board installation by HRP-5P. Credit:Advanced Industrial Science and Technology