Piernas unidas a uno de los hexápodos de los investigadores. Crédito:Collins et al.
Investigadores de CSIRO &Queensland University of Technology han llevado a cabo recientemente un estudio destinado a evolucionar automáticamente la estructura física de los robots para mejorar su rendimiento en diferentes entornos. Este proyecto, financiado por CSIRO's Active Integrated Matter Future Science Platform, fue concebido por David Howard, científico investigador del Grupo de Robótica y Sistemas Autónomos de Data61 (RASG).
"RASG se centra en la robótica de campo, lo que significa que necesitamos que nuestros robots vayan a lugares remotos y realicen misiones en situaciones adversas, condiciones ambientales difíciles, "David Howard le dijo a TechXplore." La investigación surgió a través de una oportunidad identificada, ya que RASG hace un uso extensivo de la impresión 3D para construir y personalizar nuestros robots. Esta investigación demuestra un algoritmo de diseño que puede generar automáticamente componentes imprimibles en 3-D para que nuestros robots estén mejor equipados para funcionar en diferentes entornos ".
El objetivo principal del estudio fue generar componentes automáticamente que pueden mejorar el rendimiento específico del entorno de un robot, con restricciones mínimas sobre el aspecto de estos componentes. Los investigadores se centraron particularmente en las piernas de un robot hexápodo (6 patas), que se puede implementar en una variedad de entornos, incluidos los entornos industriales, selvas tropicales, y playas.
"Las patas se pueden convertir fácilmente en archivos imprimibles en 3D, para que podamos imprimir fácilmente las patas y sujetarlas a nuestros hexápodos para desplegarlas, "Dijo Howard." Presumimos que cambiar la forma de las piernas nos daría un rendimiento diferente y el artículo describe una demostración temprana de esta capacidad. Nos inspiramos en la fuerza creativa más poderosa del planeta, uno que una y otra vez crea formas que funcionan en condiciones ambientales a veces muy difíciles:la evolución ".
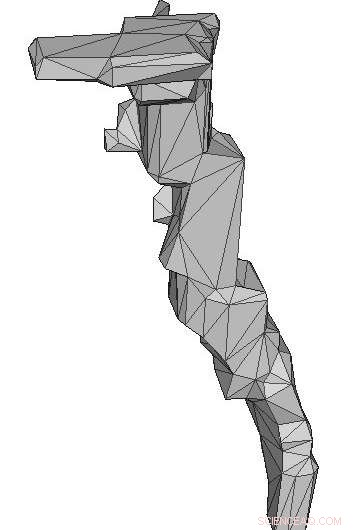
Una pata optimizada para suelos duros. Crédito:Collins et al.
El sistema desarrollado por Howard y sus colegas utiliza un algoritmo genético para optimizar las colecciones de splines Bezier (versiones 3-D de la herramienta 'curva' en Microsoft Paint), definiendo la forma de la tibia del robot. Los diseños de las piernas de los candidatos se optimizan en función de su adecuación a un entorno en particular. En su estudio, esta optimización se basó en una función de la energía necesaria para caminar por un entorno y la cantidad de material necesario para crear la pierna.
"Comenzamos con una población de piernas al azar, evaluarlos en un entorno simulado de alta fidelidad (grava, la tierra dura y el agua fueron en los que nos enfocamos) y obtenemos sus puntajes de condición física, "Howard explicó." Estos puntajes se utilizan para implementar un proceso de selección de 'supervivencia del más apto', para que las piernas buenas se mantengan y las piernas malas se "maten". Las piernas buenas tienen la oportunidad de reproducirse, usando análogos de crossover, en el que una pierna secundaria tiene características de dos piernas principales, y por mutación, donde las características de las formas se modifican aleatoriamente ".
Este enfoque permite que el algoritmo busque buenas formas para aplicar en las piernas del robot, dentro de un espacio de posibles soluciones. Los investigadores generaron una serie de piernas de los niños y luego las hicieron 'competir' con las piernas de los padres para determinar cuál se incluiría en la siguiente ronda de generación. La forma de las piernas del robot se optimizó automáticamente con el tiempo, después de cientos de tales generaciones.
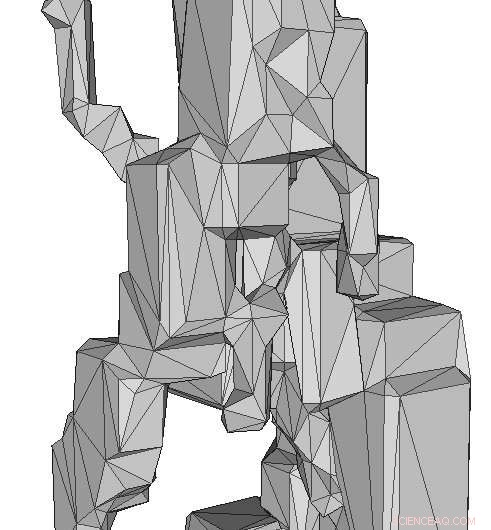
Una pata optimizada para superficies de grava. Crédito:Collins et al.
"Pudimos mostrar especialización ambiental en las poblaciones de piernas, ", Dijo Howard." Ellos evolucionaron automáticamente para que, por ejemplo, Constantemente se observaron huellas más grandes en piernas evolucionadas para caminar sobre grava, ya que esto evita que la pierna se resbale en la grava y se atasque, o gastar energía excesiva para quitar la pierna. En suelo duro por otra parte, las piernas se volvieron más delgadas ya que no había ninguna penalización por tener una huella más pequeña ".
Los investigadores encontraron que las piernas producidas estaban realmente 'en un sentido evolutivo. En otras palabras, la forma de las piernas variaba mucho, ya que habían evolucionado para funcionar mejor en diferentes entornos.
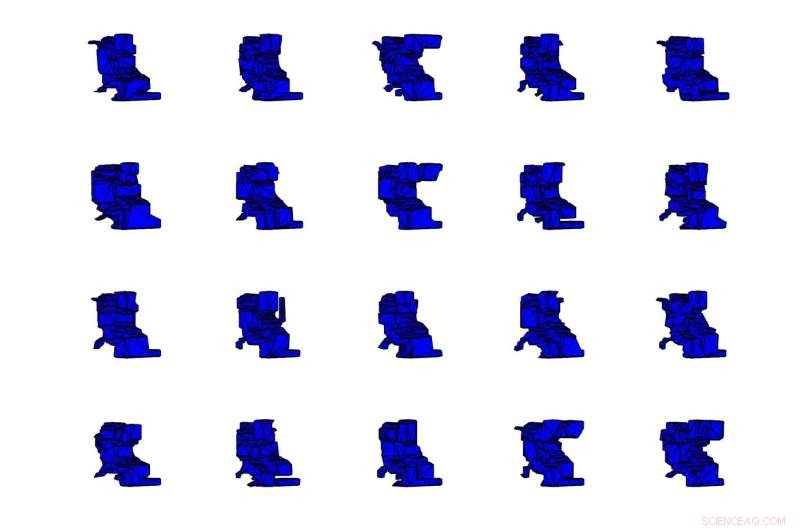
La imagen muestra lo que sucede cuando mutamos una pierna; tenga en cuenta que todas son un poco diferentes. Esto se debe a la mutación "genética" que hacemos en las curvas de Bezier. Algunas de estas variaciones serán beneficiosas y otras perjudiciales, debido a que seleccionamos en función de la aptitud, es probable que se conserven las mutaciones más beneficiosas. Crédito:Collins et al.
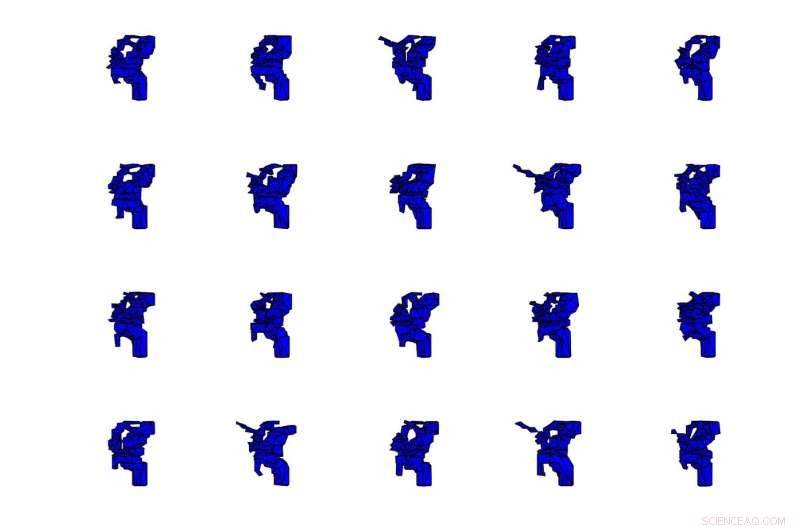
La imagen muestra lo que sucede cuando mutamos una pierna; tenga en cuenta que todas son un poco diferentes. Esto se debe a la mutación "genética" que hacemos en las curvas de Bezier. Algunas de estas variaciones serán beneficiosas y otras perjudiciales, debido a que seleccionamos en función de la aptitud, es probable que se conserven las mutaciones más beneficiosas. Crédito:Collins et al.
"En cuanto al rendimiento, también, una pierna óptima para un entorno no era tan óptima en otros entornos, ", Dijo Howard." Esto es importante porque muestra que nuestro algoritmo crea formas específicas del entorno ".
El estudio realizado por Howard y sus colegas podría ser un primer paso importante hacia el desarrollo de robots que estén mejor equipados para operar en diferentes entornos ambientales. Hasta aquí, solo han evaluado piernas generadas en simulaciones. Antes de que se puedan implementar, por lo tanto, los investigadores deberán probar sus diseños en el mundo real y demostrar que funcionan mejor que las piernas convencionales.

Piernas unidas a uno de los hexápodos de los investigadores. Crédito:Collins et al.
"También queremos considerar el uso de la evolución para seleccionar diferentes tipos de materiales en las piernas, ", Dijo Howard." Podemos utilizar la impresión 3D de varios materiales para crear patas hechas con diferentes tipos de materiales, lo que esperamos mejorará aún más la capacidad de las piernas para funcionar bien en diferentes entornos. También hemos comenzado a utilizar representaciones más complejas para las formas de las piernas, en este caso, redes neuronales llamadas redes de producción de patrones de composición, que puede especificar la forma y las propiedades del material de las patas sin limitarse a geometrías tipo Bézier ".
© 2018 Tech Xplore