Crédito:Wayve
Un equipo de investigadores de la startup británica Wayve ha desarrollado una forma de aplicar las redes de aprendizaje profundo a la conducción autónoma. En una publicación de blog reciente (junto con el video de demostración de YouTube que lo acompaña), los representantes describieron cómo funciona su tecnología, y ofrecer una demostración utilizando un automóvil real en una carretera real.
Como señala el equipo de Wayve, la mayoría de los vehículos autónomos utilizan una gran cantidad de cámaras y sensores, junto con herramientas de mapeo y mucha programación informática. Pero tal enfoque, ellos discuten, pasa por alto lo que parece ser una especie de techo. Los coches autónomos programados por grandes empresas como Google han llegado a un punto en el que son buenos, pero no lo suficientemente bueno para uso común. Esta, ellos reclaman, Esto se debe a que estos autos aún no son lo suficientemente inteligentes para manejar las innumerables condiciones presentes en una carretera promedio. Qué se necesita, ellos sugieren, es una computadora más inteligente, no más sensores ni programación.
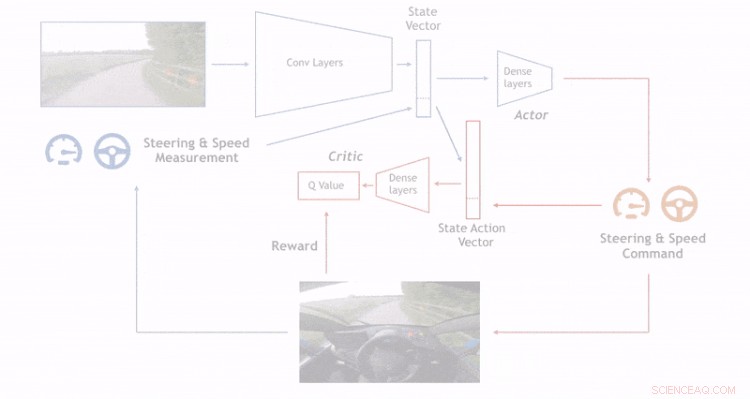
El equipo de Wayve cree que un enfoque más inteligente es utilizar algoritmos de aprendizaje por refuerzo como los que se utilizan en proyectos como DeepMind:dejar que la computadora aprenda a hacer algo de la misma manera que lo hace la gente, practicando. Los algoritmos de aprendizaje por refuerzo son lo que se encuentra en el corazón de las redes de aprendizaje profundo:aprenden haciendo, una y otra vez, mejorando a medida que avanzan. En el caso del control de vehículos autónomos, eso significaría conducir un automóvil hasta que lo hagan bien.
Para demostrar qué tan bien puede funcionar un enfoque de este tipo, un equipo de Wayve equipó un Renault Twizy con una sola cámara y gas, engranajes de control de freno y dirección y luego los conectó a un procesador de gráficos y una computadora que ejecuta algoritmos de aprendizaje por refuerzo que la compañía ha desarrollado. A la computadora se le "dijo" que el resultado óptimo sería que el automóvil avanzara por una carretera sin salirse de la misma. Cuanto más tiempo pueda hacer esto, el mejor. Luego agregaron un conductor humano y colocaron el automóvil en una carretera rural. El conductor humano apuntaría el automóvil en la dirección correcta y luego permitiría que la computadora se hiciera cargo. Si el coche estuvo a punto de salirse de la carretera, el humano lo detendría, alinee el automóvil y luego vuelva a intentarlo con la computadora. De esta forma, la computadora pudo aprender cómo evitar que el automóvil se saliera de la carretera en unos 20 minutos. Después, pudo continuar indefinidamente.
© 2018 Tech Xplore














