El rover LEAP se basa en el robot con patas, ANYmal, desarrollado en ETH Zürich y su spin-off ANYbotics. Crédito:ETH Zürich/RSL Robotics Labs
Un robot de cuatro patas entrenado a través de inteligencia artificial ha aprendido la misma lección que los astronautas del Apolo:que saltar puede ser la mejor manera de moverse en la superficie de la luna. Patrick Bambach presentó hoy una actualización de LEAP (Legged Exploration of the Aristarchus Plateau), un estudio de concepto de misión respaldado por la ESA para explorar algunos de los terrenos lunares más desafiantes, en el Europlanet Science Congress (EPSC) 2022 en Granada.
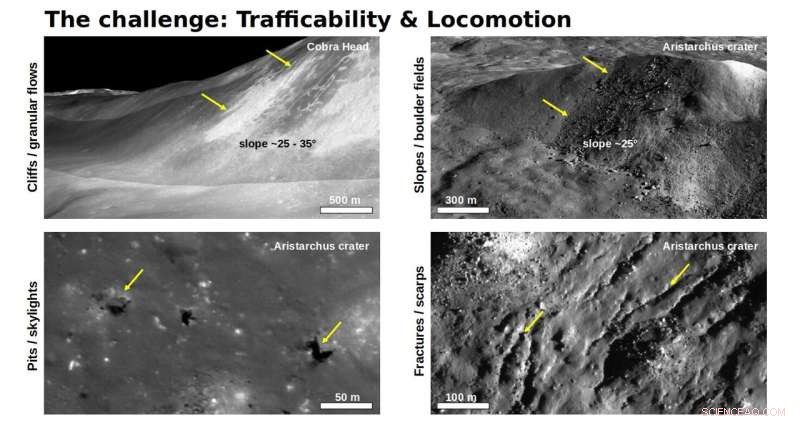
"El objetivo de LEAP es la meseta de Aristarchus, una región de la luna que es particularmente rica en características geológicas pero de acceso muy difícil", dijo Patrick Bambach del Instituto Max Planck para la Investigación del Sistema Solar en Alemania. "Con el robot, podemos investigar características clave para estudiar la historia geológica y la evolución de la luna, como la eyección alrededor de los cráteres, los sitios de impacto recientes y los tubos de lava colapsados, donde el material puede no haber sido alterado por la meteorización espacial y otros procesos. "
El equipo de LEAP está trabajando para que el robot se integre en el módulo de aterrizaje logístico grande europeo (EL3) de la ESA, que está programado para aterrizar en la luna varias veces desde finales de la década de 2020 hasta principios de la de 2030. LEAP se basa en el robot con patas, ANYmal, desarrollado en ETH Zürich y su spin-off ANYbotics. Actualmente está adaptado al entorno lunar por un consorcio de ETH Zurich, el Instituto Max Planck para la Investigación del Sistema Solar, OHB, la Universidad de Münster y la Universidad Abierta.

Diferentes versiones del robot con patas, ANYmal, desarrollado en ETH Zürich y su spin-off ANYbotics. Crédito:ETH Zürich/RSL Robotics Labs
"Los rovers tradicionales han permitido grandes descubrimientos en la Luna y Marte, pero tienen limitaciones", dijo Bambach. "La exploración de terrenos con tierra suelta, grandes rocas o pendientes de más de 15 grados es particularmente desafiante con ruedas. Por ejemplo, el vehículo explorador de Marte Spirit terminó su misión cuando se atascó en la arena".
ANYmal puede moverse en diferentes formas de andar, lo que le permite cubrir grandes distancias en un corto período de tiempo, subir pendientes pronunciadas, desplegar instrumentos científicos e incluso recuperarse en el improbable caso de una caída. El robot también puede usar sus patas para cavar canales en el suelo, voltear rocas o rocas más pequeñas para una inspección más detallada y recoger muestras.
Inicialmente, el robot ha sido entrenado utilizando un enfoque de aprendizaje por refuerzo en un entorno virtual para simular el terreno lunar, la gravedad y las propiedades del polvo. También se ha desplegado en el campo para una caminata al aire libre.
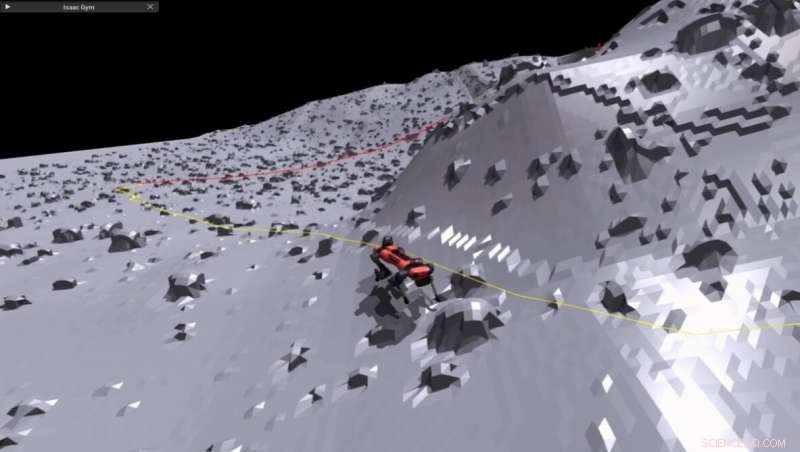
El rover LEAP se entrena utilizando un enfoque de aprendizaje por refuerzo en un entorno virtual para simular el terreno lunar, la gravedad y las propiedades del polvo. Crédito:ETH Zürich/RSL Robotics Labs

LEAP (Legged Exploration of the Aristarchus Plateau) es un estudio de concepto de misión financiado por la ESA para explorar algunos de los terrenos lunares más desafiantes. Crédito:ETH Zürich/RSL Robotics Labs
El objetivo de LEAP es la meseta Aristarchus, una región de la Luna que es particularmente rica en características geológicas pero de acceso muy difícil. Crédito:NASA/ESA
"Curiosamente, ANYmal comenzó a usar un modo de locomoción similar a un salto, tal como lo hicieron los astronautas del Apolo, al darse cuenta de que saltar puede ser más eficiente desde el punto de vista energético que caminar", dijo Bambach.
El diseño actual permanece por debajo de los 100 kg e incluye 10 kg de masa de carga útil científica, teóricamente capaz de transportar sensores multiespectrales, radares de penetración terrestre, espectrómetros de masas, gravímetros y otros instrumentos.
"La capacidad de LEAP para recolectar muestras seleccionadas y llevarlas a un vehículo de aterrizaje o de ascenso ofrece oportunidades emocionantes adicionales para misiones de muestreo y retorno en entornos altamente desafiantes en la Luna o Marte", dijo Bambach. Usando ruedas en forma de C, este rover puede escalar terrenos lunares más desafiantes