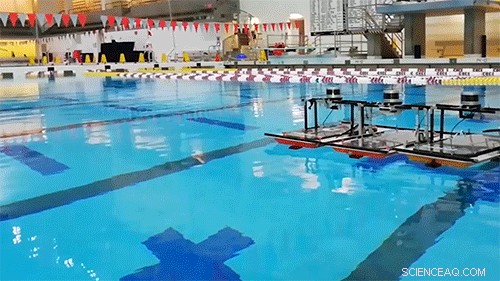
La flota de botes robóticos del MIT se ha actualizado con nuevas capacidades para "cambiar de forma, ”Desconectando y volviendo a ensamblar de forma autónoma en diferentes configuraciones para formar varias plataformas flotantes en los canales de Amsterdam. En experimentos en una piscina, los barcos se reorganizaron desde una línea recta conectada en una "L" (mostrada aquí) y otras formas. Crédito:Instituto de Tecnología de Massachusetts
La flota de botes robóticos del MIT se ha actualizado con nuevas capacidades para "cambiar de forma, "desconectando y volviendo a ensamblar de forma autónoma en una variedad de configuraciones, para formar estructuras flotantes en los numerosos canales de Ámsterdam.
Los barcos autónomos, cascos rectangulares equipados con sensores, propulsores, microcontroladores, Módulos GPS, cámaras, y otro hardware:se están desarrollando como parte del proyecto "Roboat" en curso entre el MIT y el Instituto de Ámsterdam para Soluciones Metropolitanas Avanzadas (Instituto AMS). El proyecto está dirigido por los profesores del MIT Carlo Ratti, Daniela Rus, Dennis francés, y Andrew Whittle. En el futuro, Ámsterdam quiere que los roboats recorran sus 165 sinuosos canales, transporte de mercancías y personas, recolectando basura, o autoensamblarse en plataformas "emergentes", como puentes y escenarios, para ayudar a aliviar la congestión en las concurridas calles de la ciudad.
En 2016, Los investigadores del MIT probaron un prototipo de lancha que podría avanzar, hacia atrás, y lateralmente a lo largo de un camino preprogramado en los canales. El año pasado, investigadores diseñados a bajo costo, Impreso en 3-D, versiones de un cuarto de escala de los barcos, que eran más eficientes y ágiles, y vino equipado con algoritmos avanzados de seguimiento de trayectoria. En junio, crearon un mecanismo de enganche autónomo que permitía a los barcos apuntar y abrocharse entre sí, y sigue intentándolo si fallan.
En un nuevo artículo presentado en el Simposio Internacional IEEE de la semana pasada sobre Sistemas Multi-Robot y Multi-Agent, los investigadores describen un algoritmo que permite a los roboats reformarse sin problemas de la manera más eficiente posible. El algoritmo maneja toda la planificación y el seguimiento que permite que los grupos de unidades de botes rodantes se desenganchen entre sí en una configuración establecida, recorre un camino libre de colisiones, y vuelva a colocarlo en su lugar apropiado en la nueva configuración del conjunto.
En demostraciones en un grupo del MIT y en simulaciones por computadora, grupos de unidades de botes de remo enlazadas se reorganizaron de líneas rectas o cuadrados a otras configuraciones, como rectángulos y formas en "L". Las transformaciones experimentales solo tomaron unos minutos. Los cambios de forma más complejos pueden tardar más, dependiendo del número de unidades móviles, que pueden ser decenas, y las diferencias entre las dos formas.
"Hemos habilitado a los roboats para que ahora establezcan y rompan conexiones con otros roboats, con la esperanza de trasladar las actividades de las calles de Amsterdam al agua, "dice Rus, director del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) y el Profesor Andrew y Erna Viterbi de Ingeniería Eléctrica e Informática. "Un conjunto de barcos puede unirse para formar formas lineales como puentes emergentes, si necesitamos enviar materiales o personas de un lado a otro de un canal. O, podemos crear plataformas emergentes más amplias para los mercados de flores o alimentos ".
Junto a Rus en el papel están:Ratti, director del Senseable City Lab del MIT, y, también del laboratorio, primer autor Banti Gheneti, Ryan Kelly, y Drew Meyers, todos los investigadores; posdoctorado en el Parque Shinkyu; y el investigador Pietro Leoni.
Crédito:Instituto de Tecnología de Massachusetts
Trayectorias sin colisiones
Por su trabajo, los investigadores tuvieron que afrontar desafíos con una planificación autónoma, seguimiento, y grupos de conexión de unidades de bote a remo. Dándole a cada unidad capacidades únicas para, por ejemplo, ubicarse, acordar cómo romper y reformar, y luego moverse libremente, requeriría técnicas complejas de comunicación y control que podrían hacer que el movimiento sea ineficaz y lento.
Para permitir operaciones más fluidas, los investigadores desarrollaron dos tipos de unidades:coordinadores y trabajadores. Uno o más trabajadores se conectan a un coordinador para formar una sola entidad, denominada "plataforma de embarcaciones conectadas" (CVP). Todas las unidades de coordinador y trabajador tienen cuatro hélices, un microcontrolador con capacidad inalámbrica, y varios mecanismos de enganche automatizados y sistemas de detección que les permiten vincularse entre sí.
Coordinadores sin embargo, también vienen equipados con GPS para navegación, y una unidad de medida inercial (IMU), que calcula la localización, pose, y velocidad. Los trabajadores solo tienen actuadores que ayudan al CVP a dirigirse por un camino. Cada coordinador conoce y puede comunicarse de forma inalámbrica con todos los trabajadores conectados. Las estructuras comprenden múltiples CVP, y los CVP individuales pueden unirse entre sí para formar una entidad más grande.
Durante el cambio de forma, todos los CVP conectados en una estructura comparan las diferencias geométricas entre su forma inicial y la nueva forma. Luego, cada CVP determina si permanece en el mismo lugar y si necesita moverse. A cada CVP en movimiento se le asigna un tiempo para desmontar y una nueva posición en la nueva forma.
Cada CVP utiliza una técnica de planificación de trayectoria personalizada para calcular una forma de alcanzar su posición objetivo sin interrupciones. mientras optimiza la ruta para la velocidad. Para hacerlo cada CVP precalcula todas las regiones libres de colisiones alrededor del CVP en movimiento a medida que gira y se aleja de uno estacionario.
Después de calcular previamente esas regiones libres de colisiones, el CVP luego encuentra la trayectoria más corta hasta su destino final, que todavía evita que golpee la unidad estacionaria. Notablemente, Se utilizan técnicas de optimización para hacer que todo el proceso de planificación de trayectorias sea muy eficiente, la precomputación tarda poco más de 100 milisegundos en encontrar y perfeccionar las rutas seguras. Usando datos del GPS y la IMU, el coordinador luego estima su pose y velocidad en su centro de masa, y controla de forma inalámbrica todas las hélices de cada unidad y se mueve hacia la ubicación de destino.
En sus experimentos, los investigadores probaron CVP de tres unidades, compuesto por un coordinador y dos trabajadores, en varios escenarios de cambio de forma diferentes. Cada escenario involucró a un CVP que se desenganchaba de la forma inicial y se movía y volvía a engancharse a un punto objetivo alrededor de un segundo CVP.
Tres CVP, por ejemplo, se reorganizaron desde una línea recta conectada, donde estaban unidos a sus lados, en una línea recta conectada en la parte delantera y trasera, así como una "L" En simulaciones por computadora, hasta 12 unidades de roboat se reorganizaron desde, decir, de un rectángulo a un cuadrado o de un cuadrado sólido a una forma de Z.
Ampliar
Los experimentos se llevaron a cabo en unidades de botes de un cuarto de tamaño, que miden alrededor de 1 metro de largo y medio metro de ancho. Pero los investigadores creen que su algoritmo de planificación de trayectorias escalará bien en el control de unidades de tamaño completo, que medirá unos 4 metros de largo y 2 metros de ancho.
En aproximadamente un año, los investigadores planean usar los roboats para formar un "puente" dinámico a través de un canal de 60 metros entre el Museo de Ciencias NEMO en el centro de la ciudad de Ámsterdam y un área que está en desarrollo. El proyecto, llamado RoundAround, empleará roboats para navegar en un círculo continuo a través del canal, recoger y dejar pasajeros en los muelles y detenerse o cambiar de ruta cuando detectan algo en el camino. En la actualidad, caminar por esa vía fluvial tarda unos 10 minutos, pero el puente puede reducir ese tiempo a unos dos minutos.
"Este será el primer puente del mundo compuesto por una flota de barcos autónomos, "Dice Ratti." Un puente normal sería muy caro, porque tienes barcos atravesando, por lo que necesitaría tener un puente mecánico que se abra o un puente muy alto. Pero podemos conectar dos lados del canal [utilizando] barcos autónomos que se vuelven dinámicos, arquitectura receptiva que flota en el agua ".
Para alcanzar ese objetivo, los investigadores están desarrollando aún más los roboats para garantizar que puedan sujetar a las personas de forma segura, y son resistentes a todas las condiciones climáticas, como lluvia intensa. También se aseguran de que los roboats puedan conectarse eficazmente a los lados de los canales, que pueden variar mucho en estructura y diseño.
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.