El ala del robot de la mosca de la fruta. Crédito:Bhushan &Tomlin.
Investigadores de la Universidad de California (UC) Berkeley han diseñado recientemente dos microbots a escala de insectos, uno que salta y otro que bate sus alas artificiales. Estos diseños de robots, presentado en dos artículos prepublicados en arXiv, imitar comportamientos biológicos reales observados en insectos. Los dos microbots, conocido como el robot de la mosca de la fruta y el µbot saltarín, fueron desarrollados por Ph.D. estudiante Palak Bhushan como parte de su tesis bajo la supervisión de su profesor, Claire Tomlin.
En el futuro, los pequeños robots podrían tener numerosas aplicaciones importantes, ayudar a los humanos en tareas como la teledetección, buscando sobrevivientes después de desastres naturales, y exploración espacial. De hecho, los microbots tienen varias características favorables, incluyendo su pequeño tamaño, maniobrabilidad similar a la de un insecto y navegación más fácil en terrenos desafiantes.
"La robustez en terrenos difíciles generalmente aumenta cuanto menos interactúa un bot con el entorno, "Bhushan y Tomlin dijeron TechXplore . "Voladores y saltadores (por ejemplo, moscas, saltamontes etc.) minimice esta interacción volando / saltando sobre los obstáculos y hacia su próximo destino, en contraste con las hormigas que tienen que caminar sobre cada pequeño bulto. Los volantes son más relevantes para la Tierra y otros planetas con atmósfera densa, mientras que los saltadores son más relevantes para lugares con poca o ninguna atmósfera y menor gravedad ".
El primer robot desarrollado por los investigadores, al que se refieren como el robot de la mosca de la fruta, es el primer vehículo con alas de menos de miligramos jamás desarrollado que imita de manera efectiva la cinemática de las alas de los insectos. La mayoría de los pequeños microbots de alas batientes hasta la fecha se encuentran en una escala de masa de 100 mg. En naturaleza, sin embargo, pequeños insectos voladores (por ejemplo, moscas de la fruta) están en una escala de masa de 1 mg, y algunos pueden ser incluso más pequeños.

El tono del ala del 'robot de la mosca de la fruta', vista superior. Crédito:Bhushan &Tomlin.
"La motivación detrás del desarrollo de este microbot en particular fue cerrar la brecha de tamaño entre lo que se ha hecho y lo que es posible, ", explicaron los investigadores." Nuestro principal objetivo era demostrar el movimiento del ala en esta escala de tamaño utilizando motores y mecanismos integrados, pero con energía eléctrica externa ".
Los pequeños insectos voladores suelen generar sustentación realizando grandes golpes de ala. Uno de los desafíos clave para Bhushan y Tomlin durante el desarrollo de este robot fue crear pequeños actuadores capaces de generar rotaciones lo suficientemente grandes como para impulsar las alas artificiales.
"Los trabajos anteriores utilizan motores de rotación pequeña y luego amplifican este movimiento a rotaciones grandes utilizando un mecanismo amplificador, "Bhushan y Tomlin explican." Los tamaños de las características en estos mecanismos de amplificación bajan a 70um, incluso para bots a escala de 100 mg. Simplemente reducir el diseño en 100x conduciría a un movimiento del motor aún más pequeño que a su vez exigiría tamaños de características aún más bajos en el mecanismo de amplificación, lo cual no es factible ".
Para abordar los problemas asociados con la reducción del diseño del microbot, los investigadores crearon un motor de gran rotación que no requiere ningún mecanismo amplificador para funcionar. Lo lograron desarrollando un resorte de torsión en el que las pequeñas rotaciones de los voladizos individuales se suman para producir una gran rotación cuando se accionan en resonancia.

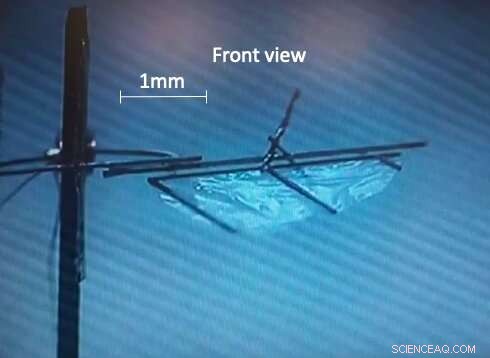
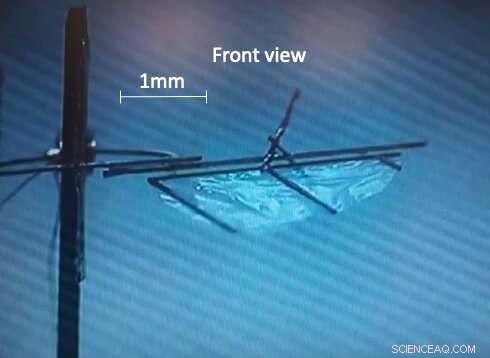
El tono del ala del 'robot de la mosca de la fruta', vista frontal. Crédito:Bhushan &Tomlin.
Con el diseño de los investigadores, los tamaños de las funciones del robot volador pueden reducirse a solo 100um, incluso en la escala de 1 mg. Notablemente, su robot de mosca de la fruta se puede fabricar en un tiempo relativamente corto. Además, Sus bajos voltajes operativos (es decir, 70 mV) deberían facilitar la prueba y la implementación en el futuro.
El segundo microbot desarrollado por los investigadores es un robot saltarín que mide 17 mm x 6 mm x 14 mm y pesa 75 miligramos. La versión atada de este robot puede saltar 6 veces por minuto, aterrizando perfectamente sobre sus pies. Para saltar 8 mm de altura, el bot consume aproximadamente 6,4 mW de energía.
Al igual que el robot de la mosca de la fruta, este pequeño robot es el más pequeño de su tipo con sus capacidades, al menos en lo que respecta a los investigadores. De hecho, el robot de salto más pequeño informado en estudios anteriores lleva una fuente de energía a bordo que pesa aproximadamente 300 mg y solo puede saltar una vez antes de que se agote su fuente de energía química.
"Nuestro objetivo era desarrollar algo en la escala de masa de menos de 100 mg que pudiera realizar saltos repetibles, ", dijeron los investigadores." Tenga en cuenta que aquí, dado que estamos a una escala mucho mayor en comparación con el robot de la mosca de la fruta, podemos ser más ambiciosos y, por lo tanto, tener una fuente de alimentación a bordo, así como."
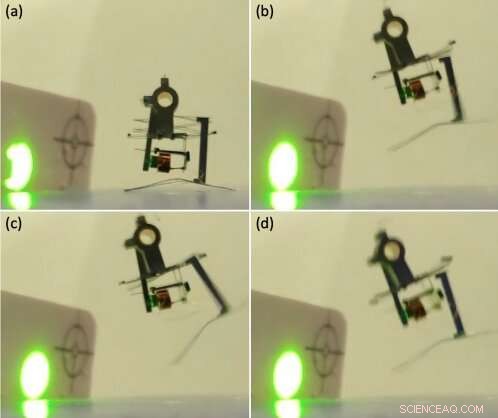
El µbot saltarín que realiza un salto utilizando energía láser. Crédito:Bhushan &Tomlin.
Los pequeños insectos saltarines generalmente empujan el suelo rápidamente con sus patas mientras realizan un salto. Esta demanda de energía instantánea es demasiado alta para reproducirla con un motor a bordo. Para superar este desafío, estudios anteriores han utilizado motores para almacenar energía en un mecanismo a bordo y luego liberar rápidamente esta energía, lo que permite al robot realizar saltos. En su estudio, los investigadores también decidieron utilizar este enfoque.
"Los motores son pesados, difícil de fabricar a pequeña escala, y requieren señales de control especiales para operarlos, "Dijeron Bhushan y Tomlin." Para simplificar la fabricación y el control, Nos aseguramos de que nuestro diseño pueda operar con un solo motor haciendo que las otras funciones requeridas ocurran de forma pasiva, además, diseñamos nuestro motor para que funcione con simples señales de control ON / OFF ".
En el robot de salto desarrollado por Bhushan y Tomlin, un solo motor genera un movimiento de rotación continuo acumulando pequeñas rotaciones. Este movimiento luego se usa para enrollar una cuerda que está diseñada para tirar de un resorte en un mecanismo de almacenamiento de energía. Una vez que la energía alcanza un umbral específico, el mecanismo libera rápidamente la energía almacenada del robot, lo que finalmente le permite saltar.
"El requisito de control simple de nuestro motor nos permite alimentarlo con células fotovoltaicas de 1 mg que producen corriente cuando se les ilumina con un láser infrarrojo, pero esta fuente de energía es solo un marcador de posición para futuras microbaterías cuando estén disponibles. ", agregaron los investigadores.

El µbot saltarín. Crédito:Bhushan &Tomlin.
La mayoría de los bots existentes a escala de 100 mg utilizan actuadores piezoeléctricos y electrostáticos que requieren altos voltajes de 200-5000V para funcionar. Esto significa que a menudo luchan con los circuitos amplificadores de voltaje pesados e ineficientes que se utilizan para impulsarlos. Según los investigadores, esta es la razón principal por la que hasta ahora se han creado con éxito muy pocos microbots completamente sin ataduras.
"Diseñamos con éxito nuevos actuadores electromagnéticos, que son un sistema de imán más bobina, como en tus auriculares, que necesitan bajos voltajes para funcionar, solo 0,07 V para el robot de la mosca de la fruta, y 0.8V para el robot de salto, "Bhushan y Tomlin dijeron." Por lo tanto, cuándo tendremos buenas microbaterías en el futuro (no las tenemos ahora), nuestros bots serán mucho más ligeros y consumirán mucha menos energía para funcionar ".
Para operar de manera efectiva, todos los robots de escala de 1 mg, así como varios robots a escala de 100 mg, requieren un entorno especial 'controlado', por ejemplo, caracterizado por un campo magnético externo cambiante, una placa calefactora o una placa vibratoria. Los actuadores utilizados por este robot de mosca de la fruta y el robot de salto, por otra parte, están a bordo, por lo tanto, estos pequeños robots también funcionan bien en entornos normales.
Impresionantemente los investigadores pudieron crear el dispositivo de envergadura de ala más pequeño reportado hasta ahora, que tiene la misma masa que una mosca de la fruta. También diseñaron con éxito el robot de salto sin ataduras más ligero con una fuente de alimentación incorporada jamás desarrollado hasta ahora.
Aleteo del ala del robot. Crédito:Bhushan &Tomlin.
En la actualidad, las baterías aún no pueden soportar robots voladores a escala de 100 mg, por lo tanto, los investigadores podrían tardar algún tiempo en impulsar con éxito su robot volador a escala de 1 mg. Es más, el motor del bot tiene una eficiencia energética del 0,7 por ciento, mientras que los músculos de una mosca de la fruta tienen una eficiencia del 17 por ciento.
En su trabajo futuro, los investigadores planean centrarse en el desarrollo de motores más eficientes, para perfeccionar aún más su diseño y prepararse para cuando finalmente se lancen baterías lo suficientemente pequeñas para soportar su bot. También les gustaría crear sensores y controladores de baja potencia por debajo de 0,1 mg, ya que esto les permitiría hacer que su robot de mosca de la fruta sea autónomo.
"En cuanto al robot saltarín, planeamos agregar un componente horizontal a la velocidad de lanzamiento que luego puede ayudar al bot a navegar, "Bhushan y Tomlin explicaron." Dados los bajos requisitos de energía de este bot y un tamaño más grande en comparación con el bot de la mosca de la fruta, también deberíamos poder agregarle baterías existentes para que realice saltos completamente autosuficientes ".
© 2019 Science X Network