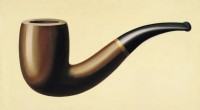
La técnica desarrollada por el MIT combina rápida y suavemente los objetos con los ocultos en densas nubes de puntos (izquierda), versus técnicas existentes (derecha) que producen errores, partidos inconexos. Crédito:Cortesía de los investigadores.
Una nueva técnica desarrollada por el MIT permite a los robots identificar rápidamente objetos ocultos en una nube de datos tridimensional, recuerda cómo algunas personas pueden dar sentido a una imagen de "Ojo Mágico" densamente estampada si la observan de la manera correcta.
Los robots normalmente "ven" su entorno a través de sensores que recopilan y traducen una escena visual en una matriz de puntos. Piensa en el mundo de bien, "La matriz, "excepto que los 1 y 0 que ve el personaje de ficción Neo son reemplazados por puntos, muchos puntos, cuyos patrones y densidades delinean los objetos en una escena en particular.
Técnicas convencionales que intentan distinguir objetos de tales nubes de puntos, o nubes de puntos, puede hacerlo con rapidez o precisión, pero no ambos.
Con su nueva técnica, los investigadores dicen que un robot puede seleccionar con precisión un objeto, como un animal pequeño, que de otro modo está oculto dentro de una densa nube de puntos, segundos después de recibir los datos visuales. El equipo dice que la técnica se puede utilizar para mejorar una serie de situaciones en las que la percepción de la máquina debe ser rápida y precisa. incluidos los automóviles sin conductor y los asistentes robóticos en la fábrica y el hogar.
"Lo sorprendente de este trabajo es que si te pido que encuentres un conejito en esta nube de miles de puntos, no hay forma de que puedas hacer eso, "dice Luca Carlone, profesor asistente de aeronáutica y astronáutica y miembro del Laboratorio de Sistemas de Información y Decisión (LIDS) del MIT. "Pero nuestro algoritmo es capaz de ver el objeto a través de todo este desorden. Así que estamos llegando a un nivel de rendimiento sobrehumano en la localización de objetos".
Carlone y el estudiante de posgrado Heng Yang presentarán detalles de la técnica a finales de este mes en la conferencia Robotics:Science and Systems en Alemania.
"Fallar sin saber"
Actualmente, los robots intentan identificar objetos en una nube de puntos comparando un objeto de plantilla:una representación de puntos en 3D de un objeto, como un conejo, con una representación de nube de puntos del mundo real que puede contener ese objeto. La imagen de la plantilla incluye "características, "o conjuntos de puntos que indican curvaturas o ángulos característicos de ese objeto, como la oreja o la cola del conejo. Los algoritmos existentes primero extraen características similares de la nube de puntos de la vida real, luego intente hacer coincidir esas características y las características de la plantilla, y finalmente rotar y alinear las entidades con la plantilla para determinar si la nube de puntos contiene el objeto en cuestión.
Pero los datos de la nube de puntos que se transmiten al sensor de un robot incluyen invariablemente errores, en forma de puntos que están en la posición incorrecta o espaciados incorrectamente, lo que puede confundir significativamente el proceso de extracción y coincidencia de características. Como consecuencia, los robots pueden realizar una gran cantidad de asociaciones incorrectas, o lo que los investigadores llaman "valores atípicos" entre nubes de puntos, y, en última instancia, identificar objetos erróneamente o perderlos por completo.
Carlone dice que los algoritmos de vanguardia son capaces de separar las malas asociaciones de las buenas una vez que se han combinado las características. pero lo hacen en "tiempo exponencial, "lo que significa que incluso un grupo de equipos de procesamiento pesado, tamizar a través de densos datos de nubes de puntos con algoritmos existentes, no podría resolver el problema en un tiempo razonable. Tales técnicas, aunque sea preciso, no son prácticos para analizar más grandes, Conjuntos de datos de la vida real que contienen densas nubes de puntos.
Otros algoritmos que pueden identificar rápidamente características y asociaciones lo hacen apresuradamente, creando una gran cantidad de valores atípicos o detecciones erróneas en el proceso, sin ser consciente de estos errores.
"Es terrible si esto se ejecuta en un automóvil autónomo, o cualquier aplicación crítica para la seguridad, "Dice Carlone." Fallar sin saber que estás fallando es lo peor que puede hacer un algoritmo ".

Los robots actualmente intentan identificar objetos en una nube de puntos comparando un objeto de plantilla:una representación de puntos en 3-D de un objeto, como un conejo, con una representación de nube de puntos del mundo real que puede contener ese objeto. Crédito:Christine Daniloff, MIT
Una vista relajada
Yang y Carlone, en cambio, idearon una técnica que elimina los valores atípicos en "tiempo polinomial, "lo que significa que puede hacerlo rápidamente, incluso para nubes de puntos cada vez más densas. De este modo, la técnica puede identificar de forma rápida y precisa objetos ocultos en escenas abarrotadas.
Los investigadores utilizaron por primera vez técnicas convencionales para extraer características de un objeto de plantilla de una nube de puntos. Luego desarrollaron un proceso de tres pasos para igualar el tamaño, posición, y orientación del objeto en una nube de puntos con el objeto de plantilla, al mismo tiempo que identifica asociaciones de características buenas de malas.
El equipo desarrolló un algoritmo de "esquema de votación adaptativo" para eliminar valores atípicos y hacer coincidir el tamaño y la posición de un objeto. Por tamaño, el algoritmo hace asociaciones entre la plantilla y las características de la nube de puntos, luego compara la distancia relativa entre las entidades en una plantilla y las entidades correspondientes en la nube de puntos. Si, decir, la distancia entre dos entidades en la nube de puntos es cinco veces mayor que la de los puntos correspondientes en la plantilla, el algoritmo asigna un "voto" a la hipótesis de que el objeto es cinco veces más grande que el objeto de la plantilla.
El algoritmo hace esto para cada asociación de características. Luego, el algoritmo selecciona aquellas asociaciones que caen bajo la hipótesis de tamaño con más votos, e identifica esas como las asociaciones correctas, mientras poda a los demás. De este modo, la técnica revela simultáneamente las asociaciones correctas y el tamaño relativo del objeto representado por esas asociaciones. El mismo proceso se utiliza para determinar la posición del objeto.
Los investigadores desarrollaron un algoritmo separado para la rotación, que encuentra la orientación del objeto de plantilla en un espacio tridimensional.
Hacer esto es una tarea computacional increíblemente complicada. Imagínese sosteniendo una taza e intentando inclinarla así, para que coincida con una imagen borrosa de algo que podría ser la misma taza. Hay muchos ángulos en los que puedes inclinar esa taza, y cada uno de esos ángulos tiene cierta probabilidad de coincidir con la imagen borrosa.
Las técnicas existentes resuelven este problema considerando cada posible inclinación o rotación del objeto como un "costo":cuanto menor es el costo, es más probable que esa rotación cree una coincidencia precisa entre características. Cada rotación y el costo asociado se representan en una especie de mapa topográfico, compuesto por múltiples colinas y valles, con elevaciones más bajas asociadas con menor costo.
Pero Carlone dice que esto puede confundir fácilmente un algoritmo, especialmente si hay varios valles y ningún punto más bajo discernible que represente el verdadero, coincidencia exacta entre una rotación particular de un objeto y el objeto en una nube de puntos. En lugar de, el equipo desarrolló un algoritmo de "relajación convexa" que simplifica el mapa topográfico, con un solo valle que representa la rotación óptima. De este modo, el algoritmo es capaz de identificar rápidamente la rotación que define la orientación del objeto en la nube de puntos.
Con su acercamiento, el equipo pudo identificar de manera rápida y precisa tres objetos diferentes:un conejito, un dragón, y un Buda, escondido en nubes de puntos de densidad creciente. También pudieron identificar objetos en escenas de la vida real, incluyendo una sala de estar, en el que el algoritmo pudo detectar rápidamente una caja de cereal y una gorra de béisbol.
Carlone dice que debido a que el enfoque puede funcionar en "tiempo polinomial, "se puede escalar fácilmente para analizar nubes de puntos aún más densas, similar a la complejidad de los datos de los sensores para automóviles sin conductor, por ejemplo.
"Navegación, fabricación colaborativa, robots domésticos, búsqueda y rescate, y los autos autónomos es donde esperamos tener un impacto, "Dice Carlone.
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.